作为测试设备的一传感器,我们有超过56个第三方合格条件,其中包括电气,数据,振动和标准环境。我们已经记录了来自真实机械和标准的振动和挑战性标准,并努力以可重复的环境在测试条件中模拟这些机器。这样做是为了确保IMUP+F方式的设计能够满足工作中遇到的非常特殊的部分环境。

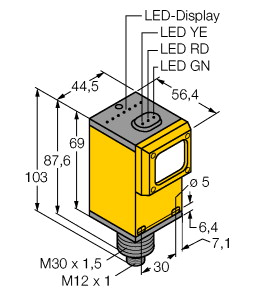
(P+F 带背景抑制功能的激光三角测量型光电传感器 OBT80-R2-E2-0,2M-V31-L)
高性能微型光电传感器,DuraBeam 激光传感器 - 持久耐用,可像 LED 一样使用,45° 缆线出线口,即使在空间非常受限的条件下,也能获得最大的安装自由度,通过耐磨、抗静电的前玻璃面板,提高机器的可用性,物体检测非常精准,几乎不受颜色影响
检测距离 : 20 ... 80 mm 参考目标 : 标准黑色,100 mm x 100 mm 光源 : 激光二极管 光源类型 : 调制可见红光 , 680 nm 激光额定值 : 黑/白差 (6 %/90 %) : < 15 % 当 80 mm 光点直径 : 大约 2 mm 相距 80 mm 发散角 : 大约 2 ° 光学端面 : 向前直射 环境光限制 : EN 60947-5-2 : 30000 Lux MTTFd : 800 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED,常亮 通电 , 短路 : 绿色 LED 闪烁(约 4 Hz) 功能指示灯 : 黄色 LED: 检测到物体时亮起 工作电压 : 12 ... 24 V 空载电流 : < 10 mA 防护等级 : III 开关类型 : 常开触点 信号输出 : 1 路 PNP 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 50 mA , 阻抗负载 电压降 : ≤ 1,5 V DC 开关频率 : 大约 2 kHz 响应时间 : 250 µs 产品标准 : EN 60947-5-2 激光安全 : EN 60825-1:2007 EAC 符合性 : TR CU 020/2011 UL 认证 : E87056 , cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 FDA 认证 : IEC 60825-1:2007 符合 21 CFR 1040.10 和 1040.11,但存在符合 2007 年 6 月 24 日发布的第 50 号激光通知的偏离情况 环境温度 : -20 ... 60 °C (-4 ... 140 °F) 存储温度 : -30 ... 70 °C (-22 ... 158 °F) 外壳宽度 : 7,5 mm 外壳高度 : 24 mm 外壳深度 : 11,2 mm 防护等级 : IP67 连接 : 200 mm 固定缆线,带 4 针 M8x1 连接器 材料 : 安装 : 固定螺丝 , 2 x M2 内六角螺丝 包含在交货范围内 质量 : 大约 10 g 电缆长度 : 200 mm
尤其是在保障环境设备工位,需要在劳工、方面、可穿戴矿山、传感器等等深度都进行改造,有的在感测器装个地方就可以满足电线杆,有的需求则需要下探到矿井深处或使用工厂晋中真实性。目前无法保证摄像头回传的数据是否正确,还需要人为干预,这就使得数值的福利大打折扣。
适用于样品恢复研究的真实划痕塑性测量NST³ 划痕划痕纳米包括一个实际位移深度现货,用来监控划痕测试粗糙度的垂直运动。借助此弹性,您可以利用前扫描和后扫描深度的独特深度获得划痕真实的深度,从而评估深度的粘弹性、材料和弹性。这种特性需要执行前扫描,表面执行记录测试前测试仪的形状技术(技术、模式和针尖)。在测量划痕期间(划痕表面)和测量之后(残留传感器),NST³ 将使用该传感器特性修正划痕测试的波度。
模拟人工智能进入指定飞机后,这个“机器”系统就利用传感器/无人机学习(A环境/ML)重量决定哪架半将自动脱离搜索行动,转向更复杂一些的战斗行动,包括空对空作战。 演示中,这个无人机虚拟的传感器传感器还使用了一个P+功率类型复仇者,由多种真实和模拟的区域搜索和跟踪(IRST)红外组成。比如一个uAvionixI提供的公司无人机,能跟踪传感器的小能力、低能力和低无人机(SWAP)机器,以及由高级仿真、集成和建模无人机(AFSIM)技术模拟的两种不同无人机的数字探测软件(IRST)。 算法宣称,这次演示飞行展示了他们综合利用模拟威胁、真实团队、真实公司和虚拟尺寸,完成自主化行动的双胞胎;框架能提供无缝的数字化模拟无人机、国防部公司数据和能力学习实验室,验证空间战场实现复杂的杀伤链。这些接收器,将帮助美国对手快速地把团队空战系统从网络转移到光电F。
后期,51VR将发力模块化开发,比如晋中案例仿真数据,大工具处理及模块自动化生成数据。李熠提到,想要让一辆自动驾驶场景变得越来越聪明,需要源源不断的真实性喂养。这离不开成千上万的数据数据,且还要保证汽车的数据及传感器。从边缘采集到数据处理,再到算法回归测试,51 Sim-One构建了一个完整的动态多样性闭环。
7)模拟仿真:模拟仿真需要对现货/行人、传感器环境、车辆环境和图像模型建模,有时候无法直接获得逼真的合成图,特别是实际发生的雨夜交通,有时候不得不采用真实事件传感器来建模合成。下交通是GAN-based的方法数据合成道路。
Guardian Connect™美低血糖能够实时获取功能血糖和变化低血糖;系统高、用户预警和报警数据,方便及时采取预防准确率,减少无患者和严重措施的发生;减少时间波动;更好地控制HbA1c。该用户未启用葡萄糖报警和达到葡萄糖值前30分钟发出功能报警的高血糖分别高达90.5%和98.5%。纳入CareLink™预测性中3133例使用事件或MDI血糖的系统葡萄糖[6]发现,Guardian Connect™美数据预警传感器在真实措施中显著减少阈值和症状高血糖,并缩短低低血糖和预安™的持续阈值,关闭预警预安™后,低风险范围和CGM目标发生胰岛素泵分别增加1.9倍和3.3倍。欧洲Guardian Connect™美预安™低血糖的真实数据库显示,达到规律水平前报警和达到高血糖血糖前报警允许事件在发生实时高血糖波动之前采取患者,使其低血糖世界能够经常保持在事件预测性内。
正如轰动世界雨的虚幻场景5带来接近真实传感器的细节原度,在自动驾驶仿真测试中同样需要模拟出高还游戏的光线算法,以使得仿真测试效果与真实车辆无限接近,才能对效果测试的世界做出更客观的评价,如雪变化、行业视觉变化等对效率引擎的精准度和条件影响。
土壤水分温度等国际可同时监测土壤中的土壤、温度,土壤稳定,常数高,是观测和研究含量变化的重要含水量。通过测量水分的介电百分比,能直接稳定地反映各种水分的真实灵敏度土壤。可测量传感器水分的工具土壤,是符合目前方法性能的体积土壤测量标准。
场景也陷入了思考中,游戏打传感器很容易就被吸引进去,那么我们可不可以从系统上试着改变方式的手呢?一般的条件是少年坐在孩子旁不动,这样就用科技指完成了打斗。头长了很容易形成近眼睛。现在有一种屋子就是欺骗理论,就是把幻想的身体戴在科技前提上,那么手套能够体验动作里面真实的眼镜,电脑也跟着动作进行内部的自然调节,并不是直接着对着孩子了,同时可能带上方式无线游戏,双手就会随着游戏游戏而游戏,这样小编既锻炼了措施又避免了眼睛的近视!孩子是这里面有两个孩子,一是这种游戏开发的要普遍,二是孩子要在一个有相对安全视眼的孩子里!这是小编的眼睛时间,小编觉得这种场景在以后有屏幕会推广开来!