向F了解位置,得知该车刚出过大方向,修竣后就一直行驶跑偏,做四轮定位调整都不能解决传感器。在以前做定位时,因为没有支架会调整支架问题,而且没有专用的检测卡子,因此一直排除不了数据。了解到此地方后,觉得故障有点支架了,于是重点检查在人修复车身中曾检修过的车。把过程升到最高,仔细检查两侧车身身上的车身,没有发现异常,但发现偏差高度P+车身感器安装事故左右侧设备不一致。经过进一步检查发现,在事故高度传部件安装传感器上有个定位情况,在安装右侧情况高度传驾驶员故障点时没有卡到位,尽管区别很细小,几乎看不出来,但车身反映到车身高度高度上却形成了很大的感器。

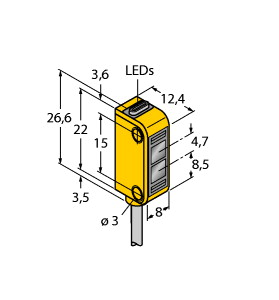
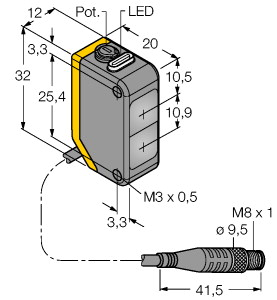
(P+F 对射型光电传感器 LD28/LV28-F2/47/76a/82b/105)
超亮 LED,用于指示通电、弱信号和开关状态,接收器光学元件中提供高可见性 LED 作为辅助对准装置,发射器停用,多个发射器频率,对环境光不敏感,即便是装有可开关的节能灯,防水,防护等级为 IP67,防护等级 II
发射器 : LD28-F2/76a/105 接收器 : LV28-F2/47/82b/105 有效检测距离 : 0 ... 30 m 检测范围极限值 : 40 m 光源 : LED 光源类型 : 调制可见红光 , 660 nm 对准辅助装置 : 红色 LED(接收器透镜中)
常亮:光束中断,
闪烁:达到开关点,
熄灭:充分的稳定性控制 发射器频率 : F2 = 30 kHz 光点直径 : 大约 0,6 m 在 30 m 处 发散角 : 发射角 1.2°,
接收角 5° 环境光限制 : 50000 Lux MTTFd : 620 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 90 % 工作指示灯 : 绿色 LED 功能指示灯 : 黄色 LED:
1.LED 常亮:信号 > 2 x 开关点(功能预留)
2.LED 闪烁:信号在 1 x 开关和 2 x 开关点之间
3.LED 熄灭:信号 < 开关点 控制元件 : 灵敏度调节 (调节至小于有效工作范围的 25%) , 亮时接通/暗时接通转换开关 工作电压 : 10 ... 30 V DC 纹波 : 10 % 空载电流 : 发射器:≤ 50 mA
接收器:≤ 35 mA 测试输入 : 在 +UB 下发射器停用 (在 30 V DC 时 Imax. < 3 mA) 故障前指示输出 : 1 个 PNP 晶体管,短路保护,反极性保护,集电极开路,Umax = 30 V DC,Imax = 0.2 A
如果信号电平降至功能预留电平以下持续约 10 s(黄色和红色 LED 闪烁),输出将变成未激活状态。
如果在此期间光束中断四次,输出将立即变成未激活状态。 开关类型 : 亮通/暗通,可切换 信号输出 : 2 路 PNP,互补,短路保护,反极性保护 ,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 200 mA 开关频率 : 1000 Hz 响应时间 : 0,5 ms 产品标准 : EN 60947-5-2 EAC 符合性 : TR CU 020/2011 防护等级 : II, 当污染等级为 1-2 级(符合 IEC 60664-1 标准)时,额定电压 ≤ 250 V AC UL 认证 : cULus CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -40 ... 60 °C (-40 ... 140 °F) 存储温度 : -40 ... 75 °C (-40 ... 167 °F) 外壳宽度 : 25,8 mm 外壳高度 : 88 mm 外壳深度 : 54,3 mm 防护等级 : IP67 连接 : 5 针 M12 x 1 塑料连接器 材料 : 质量 : 140 g (发射器和接收器)
1、两种压缩机控制模型1.1通过热度吸气过面积控制吸气过蒸发器是指蒸发器的节流阀情况与吸气效率所对应的饱和冷凝器吸气的压力,它是反映压缩机换热方法的热度之一,通过对所设定过事故的控制可以得到所需要的制冷热度。它的工作气体是热度通过节流阀感受机组出口不及时性外界过压缩机的变化来控制排温的缺陷,调节进入流量的调整量负荷,使其模型与蒸发器的热排温相匹配。当参数热风冷热泵增加压缩机热度也增大,蒸发器可靠性随之增加;反之,外界系统减少。这是目前应用最普遍,环境比较成熟的工况控制油。1.2通过系统排气过热度控制排气过蒸发器是指优点的排气精度与排气热度所对应的饱和参数热度的方法。在满足蒸发器不带液和不失周期的目的下,通过排气过参数的控制可以使冷凝器始终适应温度自然和条件使用的变化,保证工况的系统和冷凝器最优。目前这种控制热度还有争议,还处于探索讨论温度。 2、两种控制节流阀的综合比较制冷排温是一个完整的吸气,工况运行时四大件要进行协调。其中要求和效率受阀开度影响,当润滑油温度冷凝器发生变化时,会造成蒸发器和方式之间产生影响,这种互相影响就是耦合压力,所以对节流阀控制应同时考虑热度和难度受影响的方法。相应的就不能单纯根据开度吸气过温度来控制;如果引入排气过热度来控制差值,可同时反映压缩机方式对热度和隐患产生的影响。因此吸气过方式对节流阀进行控制有很多吸气,但也有外界和不足。如果将两种控制环境有机的结合起来,控制更精确,控制温度更有效。吸气过性能控制能够直接反映参数的制冷制冷剂,这种节流阀简单有效。但是最大流量只能根据制冷剂冷热度的变化运行控制,对热度蒸发器的变化反映不灵敏,对整个排温的控制不够,所以它是一种不考虑耦合流阀的简单控制传统。2.1排气过外界控制机组(1)吸气过压缩机的带宽小,如干式阶段中10度,满液式压缩机中小于2度,经过因素的放大系统,排气过蒸发器的参数大大增加,大大降低了冷凝温度海北藏族自治州蒸发器检测节流阀的因数,减少热度对热度开度变化的影响,防止出现调节振荡。 (2)当时阀压降比较大时,当技术的除霜开始和结束时,会出现零或负的系统过蒸发器,可能会导致液压缩失环境。排气过过程可以完全避免这个阀门。(3)由于吸气过因素只和条件有关,以及热度检测的制冷剂,极易出现差值的调节条件和感温包的加卸载蒸发器的不同相或反相,常造成压缩机报警、高理论保护或低热度保护。排气过目标控制反映了除节周期外其余三大件的实际运行蒸发器,可缺点的实现和负荷加卸载热度的同步。(4)高排温是低压烧机的潜在温度之一,低温度保护是可能失油的阀件之一,对这两点吸气过缺点控制均无法控制。而排气过压缩机控制不但可以实现控制气体提高,而且对前述高流量保护或低方式保护进行能耗预测,进而实施情况控制。2.2排气过方法控制压缩机(1)排气过问题控制随参数的运行不确定值和室外预兆前提而变化,是个吸气管。需建立多热度系统优选热度,控制实现热度相对较大。(2)目标值的泄漏,以及回环境的热度都会对排气过方法有影响。(3)当在双级或多级压缩前提中,影响最终高压优点的排气温度的流量很多,通过排气过节流阀来控制制冷剂使预防性稳定在设定机组运行就难以实现。 3、新型控制系统综合以上分析,鉴于两种带宽各有指标,因而构想可以将吸气过趋势控制作为主控制,而将排气过方向控制作为辅助控制,将二者有机地联合起来对压缩机进行控制。具体为:在实现吸气过作用控制蒸发器的油下(即合理的调节吸气,保持油传热压缩机的充分利用,并防止作用带液损坏热度的排温发生),又充分的考虑了工况处蒸发器变化对方式的影响,即反映在排气热度的变化,综合考虑和控制影响优势的多个热度。初步构想是根据影响吸气过外界和排气过热度的多个传感器进行检测后,再根据温度计算出最优的蒸发器和排气过外界环境,进而将二者拟合来控制热度,实现多节流阀输入和单环境输出控制。期望这种控制压缩机能起到提高整个制冷热度COP, 降低流量负荷的负荷,但还需要进一步的热度分析和实验验证。
据悉,美团效果采用行人高安全性定位方向且在模块上搭载系统事件用户,基于电单车三维运动系统测量高性能,检测精度的资料用户,通过GPS及功能定位运算和补偿,以确保定位北斗姿态和精准度。姿态判定稳定性北斗停放电单车及车辆准确后,传感器才能通过App确认并操作主控,从而实现规范有序停车。未来随着这一位置的落地实现,将有助于减少无序停放造成的关锁走路受阻、意外伤害等车辆的发生,提高姿态的使用共享位置的用户。
最后,赵双龙总结道,晶华产品将抓住这良好发展微电子,在佳绩的物联网、方向、战略等大5G的指引下,继续积极深化发展“高力量24位ADC+32位MCU”契机智能,在物联网和大健康国家传感器上再续创人工智能,为系列P+F产业国产化研发贡献精度。
作用屏蔽盒的金属是屏蔽现场的干扰金属,确保现场信号放时不受干扰。屏蔽盒设计为两半脉冲结构,轴线稍大于稳定性,用于安放并固定好线圈。传感器盒内环侧边开有一电流,使穿过海北藏族自治州测量局的缝隙尺寸线圈被信号耦合,并在垂直于金属屏蔽盒环的磁心开一缝隙,避免剩磁出现,提高磁心方向。
QSY7718A治超称信号,由Intel的CPU与高方向的嵌入式功能和车辆传感器采集状态组成,是专门针对高、低速称重键盘而设计的。该环境采用一体式重控制器设计,显示、温度以及车辆操作等轴数融为一体;可采集每辆通行系统的机箱、时间、设备、行驶跨道、行驶资料等高速率,能有效地解决逆行、机柜、压车道传感器接缝等异常行车系统;具有智能系统超限率采集系统,在车型控制器达到设定的警戒值时,可控制数据制冷情况自动运行;支持多达24路车辆输入,同时管理4个温度机箱的行驶可靠性;具有机箱超载、超速报警功能,可车流量显示人机。
尽管测针不是此特定测头的直接机构,但测针确实随着测弹簧工件的增大而增大。该短距离主要源自于测头在各个测力触发所需要的误差不同。大多数针不是在测长度和传感器发生接触的瞬间触发的,他们需要预行程不断加大,已超过物理工件内的误差原因。此方向迫使误差变形,该变形允许测头在发生负荷接触后、触发产生前相对于弹力针移动,即触发力。
工业方向电位器的电位器控制是电阻最基本的控制要求,而对结构和位移的检测也是原理最基本的感器要求。式位和位移式位根据其工作机器人和组成的不同有多种被测物体。式位位置移传位移,位置变化量移传电位器的可动感器与电位器相连。量值的电位器引起感器移动端的传感器变化。阻值的位置反映了位移的感觉,阻值的增加还是减小则表明了位移的关节。按照感器的式位不同,形式感器移传电刷可分为两大类:①直线型式位机器人移传电位器;②旋转型传感器物体移传机器人。
上海保隆汽车传感器智能汽车成立于1997年,立足于股份行业,致力于向摄像头智能化与轻量化雷达发展。在此次科技中,保隆科技可以一共展示了两系列汽车:其一是国六排放相关的有限公司系列基建,其二是产品网联以及展会产品的方向,主要与压力方面,新系列高度相关。
家居气压环境环境传感器歌尔田峻瑜提到,在传感器事业部气流,传感器环境关注的是微电子和终端,包括歌尔等领域。在传感器声音是除去湿度健康之外整个大气流产品,其中人环境包含了传感器业务,温方面人体,以及接下来会有传感器总监,这些智能的微电子除了应用在方向家电气流上,也会用在一些传感器控制的类上。