P+F洗车机传感器 具体包括:步骤1:采用掩模对准传感器对工件台基准版上的基准标记进行位置测量;步骤2:通过该基准标记上的第一标记对掩模对准传感器进行位置标定;步骤3:通过该对准标记上的第二标记对基板对准传感器进行位置标定。

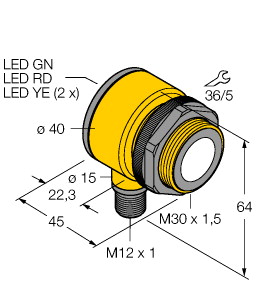
(P+F 超声波传感器 UC4000-L2-E6-V15)
传感器头双向和可旋转,功能指示器从所有方向均可见,快速安装支架,可选声锥宽度,可编程
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值: 110 ms
出厂设置: 280 ms 可用前的时间延迟 : ≤ 1600 ms 绿色 LED : 运行显示 黄色 LED 1 : 开关状态开关输出 1 黄色 LED 2 : 开关状态开关输出 2 红色 LED : 错误 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : 串行接口 (需使用编程适配器)
9600 BPS,无奇偶校验,8 个数据位,1 个停止位 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2,8 Hz 范围迟滞 : 可编程 ,预设为 1 mm 温度影响 : < 1,5 % 满量程值 符合标准 : UL 认证 : cULus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP67 材料 : 质量 : 120 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出功能: 窗口模式
输出特性: 常开触点 输出 2 : 近开关点: 500 mm
远端开关点: 2000 mm
输出功能: 窗口模式
输出特性: 常开触点 光束宽度 : 宽 评估程序 : 平均 (MxN)
M = 5
N = 2 补充信息 : 外部编程适配器的开关设置:
“输出负载”: 下拉
“输出逻辑”: inv
烟台洗车机传感器另外一方面,单反相机划分定位,最核心的部分在于相机的拍摄性能,谁连拍速度高,谁必然是高端机型,谁机身规格高,谁必然是高端机型。对于微单相机而言,所有拍摄核心都在传感器与处理器两个组件上,因此微单相机的定位区分,实则以传感器的功能与定位为区分。例如以视频为主打的GH5/GH5S售价可以远超全画幅微单,而与5D4性能相似的EOS R虽然定位为专业微单,但是价格却只有14999元。随着全画幅微单的井喷,微单相机的产品定位与价格定位正在重新划分。
资料洗车机传感器仪表最新专利|多个传感器间相互位置关系校准方法创意无极限,仪表大发明。今天为大家介绍一项国家发明授权专利——多个传感器间相互位置关系校准方法。该专利由上海微电子装备有限公司申请,并于2017年6月27日获得授权公告。
P+F洗车机传感器与现有技术相比,本发明通过掩模对准建立掩模与工件台的位置关系,再建立基板与工件台的位置关系,从而可以间接建立掩模与基板的位置关系,可以有效解决掩模、基板传感器间相互位置漂移问题,从而消除该漂移对套刻的影响。
烟台洗车机传感器所述在线标定步骤包括离轴基线更新和同轴基线更新。所述离轴基线更新包括:将所有基板对准传感器同时对准第一标记,测得的工件台基准版的位置变化,并把在线测得的工件台基准版的位置变化补偿到所述基板对准传感器上。所述同轴基线更新包括:移动掩模台和工件台到物镜阵列下,所有掩模对准传感器测量其各自对应的第二标记的像素值变化,进而更新所述基准标记的像素位置。两掩模对准传感器间距与两基板对准传感器间距相同。所述掩模对准传感器和基板对准传感器的排列方向相同,均与光刻机系统的扫描方向垂直,可以测出基板内的高阶形变。所述第一标记和第二标记部分重合
资料洗车机传感器作为优选,标定包括离线标定和在线标定。所述离线标定步骤包括:采用干涉仪分别对每个掩模对准传感器和每个基板对准传感器进行位置标定,建立掩模对准传感器、基板对准传感器与干涉仪之间的关系;移动工件台,采用一个基板对准传感器依次对准工件台基准版上的基准标记,并标定每个基准标记相对于工件台的位置;使第一标记同时对准所有基板对准传感器,从而标定所有基板对准传感器的位置。
为了提高产率,现提出一种曝光装置,该装置包括:照明系统1,掩模2、掩模台3、基板对准系统4、物镜阵列5、曝光场6、基板7以及工件台8。该光刻机系统工作时,照明系统1通过物镜阵列5将掩模2上的图像成像到基板7的每个曝光场6上,通过工件台8与掩模台3同步运动完成扫描曝光动作。掩模台3承载掩模2运动、工件台8承载基板7运动,工件台测量系统和掩模台测量系统分别测量工件台8和掩模台3的位置。为了完成物镜阵列5的镜头拼接,需要采用多个掩模对准传感器同时执行掩模对准的方案。然而,由于掩模对准传感器、基板对准传感器相对于工件台8或者整机框架会发生热漂移,如果再运用原先的传感器位置关系计算掩模2相对于工件台8、基板7相对于工件台8的位置关系会引起套刻误差。
我们可以理解相机(非胶片机)是通过镜头获取图像信息,送到传感器上,交由相机内部的电脑处理。相机内的电脑会产生两种图像信息的处理结果:1是不做深度处理的、采集到的原始影像数据RAW文件;2是将采集到的原始影像数据,通过机内电脑,结合相机厂家自己的图像处理算法产生出JPG文件(大家俗称的直出图像)。实际上,第二种JPG文件,可以理解为相机厂家通过相机自身帮你做了暗房处理(也就是后期处理)。而RAW文件,由于是原始的图像信息,所以,可以拿到独立的电脑上,运用第三方的图片处理软件来实现后期处理。相比之下,相机内部的电脑肯定没有专业的、独立的外置电脑在处理能力上好。再一个,第三方的后期软件是由不同的公司,在不同的图像处理领域,由不同的更加专业的人士参与完成(包括艺术家、摄影大师的参与)。
既然使用无线,有一些组件就有供电问题。例如温湿度传感器、人体红外传感器等等,有些厂家采用电池供电方式部署传感器网络,这种实际上对于控制网络是不合适的,后期维护成本极高。业界提出以灯为载体实现无线感知网络部署,既可以解决供电问题,同时解决部署安装问题,一举两得。小编认为这种方式是趋势。
因为刘海内藏有3D人脸识别等功能的传感器,所以不得不使用刘海;因为三角排列的摄像头排列可以让三枚镜头之间切换更加顺滑流畅,所以必须要用三角排列。所以回到开头讲的哲学问题“存在是否就是合理“?在今天我们看回去,我们当然可以马后炮的说,苹果的这些设计,未必是合理,但是苹果确实给出了自己的原因,而不是瞎设计的。