P+F洗车机传感器Alpha 7R IV升级的对焦系统具备567个相位检测对焦点,覆盖约74%取景范围。此外,相机还具备425个对比度检测对焦点,为低照度和其他需要采用对比度检测对焦方式的拍摄环境,提供更高的准确性。Alpha 7R IV具备更高的AF传感器密度和优化的追踪算法,显著提升了追踪性能。针对拍摄对象的复杂运动和突然发生的运动,实现比以往更可靠的追踪性能和更高的对焦精度。

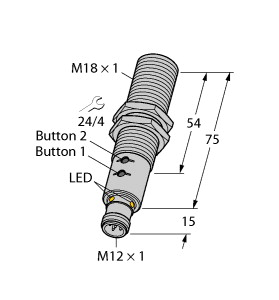
(P+F 超声波传感器 UC4000-30GM-E7R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,NPN,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
青岛洗车机传感器工作特点:①结构简单而牢固,无可动部件,可靠性高,长期运行十分可靠;②安装简单,维护十分方便;③检测传感器不直接接触被测介质,性能稳定,寿命长;④输出是与流量成正比的脉冲信号,无零点漂移,精度高;⑤测量范围宽,量程比可达1:10;⑥压力损失较小,运行费用低,更具节能意义。
含税运洗车机传感器本次召回范围内车辆用户手册对于涉水行车提示“涉水深度最大为30厘米”的描述有误。由于电动转向机(EPS)的转矩传感器壳体在满载状态下距离地面高度为28cm,若车辆多次在超出电动转向机(EPS)设计允许的涉水环境下行驶(涉水深度超过25cm,车速超过步行速度5km/h),转矩传感器的密封性可能受到影响,导致其进水损坏,最终使得车辆丧失转向助力功能,增加车辆发生事故的风险,存在安全隐患。
P+F洗车机传感器6100万像素售价3500美金 索尼正式发布Alpha 7R IV2019年7月16日,索尼(中国)有限公司正式发布了新一代画质旗舰全画幅微单TM Alpha 7R IV(型号名:ILCE-7RM4)。Alpha 7RIV秉承索尼微单TM轻巧便携的机身设计,采用新开发的约6100万有效像素全画幅ExmorR™CMOS背照式影像传感器,具备15级动态范围,每秒10张的高速连拍以及567个相位检测对焦点,支持实时追踪和视频实时眼部对焦功能,并且在机身设计和操控方面进行了诸多改进。Alpha7R IV定义了高画质与高速度的平衡点,提供媲美中画幅的高分辨率和高动态范围,同时具备高速对焦和高速连拍的强大性能,加上出色的连接性和操作性,是广大专业摄影师、专业视频工作者以及摄影爱好者的理想选择。目前售价3500美金,预计9月正式上市。
青岛洗车机传感器基于星凸形随机超曲面模型多扩展目标多伯努利滤波器随着电子技术和传感器分辨率的不断提高,传统多目标跟踪(MTT)中的“点目标”假设不再成立,一个目标在采样时刻内对应多个量测,这样的目标可以称之为“扩展目标(ET)”。扩展目标是具有一定空间范围的目标,其检测信号往往会对应传感器的多个分辨单元,目标对应传感器的多个量测信息,会呈现出一个 “稀疏点量测集”。所以,可借助多源信息融合技术,利用多个量测信息对目标特征进行更深层次的估计。扩展目标跟踪(ETT)问题在现代目标跟踪与识别系统中受到极大的关注,如濒海监视、自主式武器、机器人技术等领域。
含税运洗车机传感器Alpha 7R IV采用新的约6100万有效像素全画幅ExmorR™CMOS背照式影像传感器,背照式结构与出色降噪技术相结合,可提供高感光低噪点的优异影像画质。相机在低感光度下具备15级动态范围,使画面中阴影到高光的渐变平滑自然。此外,Alpha7R IV采用了诸多新的算法,确保优异的色彩还原。
就5G无人驾驶而言,景区道路人车混行,比常规人车分离的城市道路更具考验。这15台智能网联车的无人驾驶系统,采用包含多个雷达、摄像头的多传感器融合方案,能够感知周边70米范围内路况,即时生成最优路径并智能化组合油门、刹车等控制方案,确保安全驾驶。
6100万像素!索尼A7R4来了2019年7月16日,索尼(中国)有限公司正式发布了新一代画质旗舰全画幅微单TM Alpha 7R IV(型号名:ILCE-7RM4)。Alpha 7R IV秉承索尼微单TM轻巧便携的机身设计,采用新开发的约6100万有效像素全画幅Exmor R™CMOS背照式影像传感器,具备15级*1动态范围,每秒10张*2的高速连拍以及567个相位检测对焦点,支持实时追踪*3和视频实时眼部对焦功能*4,并且在机身设计和操控方面进行了诸多改进。Alpha 7R IV定义了高画质与高速度的平衡点,提供媲美中画幅*5的高分辨率和高动态范围,同时具备高速对焦和高速连拍的强大性能,加上出色的连接性和操作性,是广大专业摄影师、专业视频工作者以及摄影爱好者的理想选择。
相关召回公告显示,此次召回的车辆涉及各种原因。其中,宝马召回范围内车辆用户手册对于涉水行车提示“涉水深度最大为30厘米”的描述有误。由于电动转向机(EPS)的转矩传感器壳体在满载状态下距离地面高度为28cm,若车辆多次在超出电动转向机(EPS)设计允许的涉水环境下行驶,转矩传感器的密封性可能受到影响,从而存在安全隐患。福特进口林肯飞行家汽车召回范围内的部分车辆,电瓶线束可能存在没有被正确固定的情况,从而导致线束短路和潜在的起火风险,存在安全隐患。
仿生导航是模仿生物导航机理来实现智能导航的研究领域。与生物导航相关的重要感知器官以及大脑中记忆、推理等意识活动都是该领域研究模仿的对象,因此仿生导航领域主要是对仿生导航传感器及其相应算法实现的研究。仿生导航具有成本低、体积小、功耗低、抗干扰能力强等优势,适合如海洋、沙漠和丛林等复杂环境下的自主智能导航。从PNT的信息源上,学习分析生物所具备的PNT智能的机理,可将其利用自然信号的机理工程化后,赋给机器。根据获取的可利用的机会信号,可将实现PNT智能的信号源分为电信号、磁场信号、重力场信息、偏振光信号、可见光信号、声信号和化学成分的气味信号等。复眼和动态视觉等多种信号敏感器官,例如蝙蝠利用自主式超声波导航,海星根据复眼视觉系统感知进行被动式海底导航[31],信鸽可同时感知地磁和太阳偏振光轴东升西落的方位变化进行定向导航[32-33],同样沙蚁、蜜蜂和帝王蝴蝶等昆虫也通过感知偏振光实现导航[34-36]。动物PNT智能都是服务于其寻找资源和安全保障,其目标和任务线明确。动物PNT智能具有自然智能低耗能、高效率、自适应、自组织、自完善、自我更新的特性。动物PNT智能极大促进了仿生导航传感器技术的发展,丰富了智能PNT的内涵,使得在没有GNSS信号等环境中,能源有限的微小智能体也能获得PNT智能。仿生导航传感器技术并不是新鲜领域——相机、惯性导航单元和声呐等传感器都是对生物的视觉、运动感知和声波感知的相关器官与能力的模仿。除了这些以外,仿生光罗盘、仿生磁罗盘和仿生复眼等仿生传感器可以像生物一样感知偏振光、地磁信号或拥有全视场视觉。PNT器件智能化的重要方向之一是仿生导航传感器的发展。当前主流的智能仿生导航器件主要包括仿生光罗盘导航技术、仿生地磁导航技术、仿生声学导航技术、仿生复眼导航技术和动态视觉仿生导航技术,与此对应的PNT器件主要包括仿生光罗盘、仿生磁罗盘、仿生声呐、仿生复眼和视觉相机[37]。受沙蚁导航方式的启发,法国团队开发了一款天体罗盘并将其应用于室外机器人的自主导航,它可以计算出紫外线范围内移动机器人的航向角,使得机器人即使在GNSS或者磁强计失效的情况下也能补偿惯性传感器的漂移[38]。进一步,该团队设计利用太阳偏振光导航的六足机器人AntBot,该机器人主要携带一个光流传感器和一个天体罗盘,其中天体罗盘由装有旋转线性偏振器的紫外光二极管组成,通过两个传感器的数据确定入射光的偏振角从而确定太阳的方向,即使在紫外线指数很低的情况下都能为机器人的行走提供航向[39]。香港理工大学模仿人类视网膜工作原理开发了一种新型类视网膜视觉传感器,能够有效感知199 dB范围的光线,能为弱光、雨雪等条件下运行的智能体提供强大的终端感知能力[40]。4.3 人工智能增强几何算法型PNT技术