P+F洗车机传感器 便携式二氧化碳气体分析仪【霍尔德HED-HW200】是我厂新推出的一种利用红外光谱吸收原理,对低浓度的二氧化碳测量仪器,红外二氧化碳检测仪同时可以检测二氧化碳浓度、温度和湿度。具有非常清晰的彩色触摸屏,声光报警提示,带内置泵,红外二氧化碳气体分析仪广泛用于公共场所、卫生监督、环境监测、疾控部门等气体的检测与监测。成功解决了,在高温和低温测量中的精度保证和补偿、精度非常的高,可用于科研等监测部门。 仪器特点: 1、检测空气中的二氧化碳气体浓度,同时可以检测该环境的温度和湿度。 2、采用高精度红外传感器,测量精度高、响应速度快、预热时间短; 3、支持氮气校零和催化校零两种方式; 4、具有机内恒温加热功能,适合户外低温环境下运行; 5、内置调零过滤器,可在不用外接零气的条件下进行传感器调零,使用方便; 6、具有温湿度测量功能、内置温湿度补偿修正算法,消除温湿度变化对测量数据的影响; 7、自带吸气泵可将数十米距离外的气体吸入仪器进行测定。 8、7英寸电容触摸屏,测量数据具有数字显示和仪表盘显示两种模式,数据显示直观,操作方便快捷。 9、仪器显示有PPM和mg/M³两种显示数据,可以自动转换。 10、自动零点校正技术,方便用户在不同季节和时间,进行零点修正。 11、具有瞬时值,平均值,30分钟平均值,8小时平均值,24小时平均值,存储功能。 12、仪器自带数据存储,储存数据可达10000组,可以直接查询检测数据。 13、带有USB数据接口,可以将数据导入电脑。 14、采用进口采样泵,负载能力强,使用寿命长;

(P+F 超声波传感器 UC4000-30GM-IUEP-IO-V15)
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,开关输出和模拟量输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
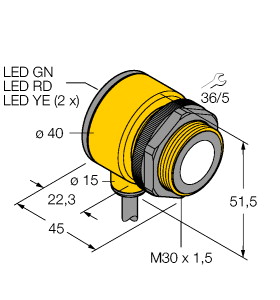
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS
15 ... 30 V 输出电压 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 1 路推挽(4 合 1)输出,短路保护,反极性保护
电流输出 4 mA ...20 mA 或
电压输出 0 V ...10 V 可配置 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 分辨率 : 电流输出:评估范围 [mm]/3200,但 ≥ 0.35 mm
电压输出:评估范围 [mm]/4000,但 ≥ 0.35 mm
特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 负载阻抗 : 电流输出: ≤ 300 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出模式: 窗口 模式
输出特性: 常开触点 输出 2 : 近极限: 500 mm
远极限: 2000 mm
输出模式: 上升斜坡
输出特性: 电流输出 4 mA ...20 mA 光束宽度 : 宽
滨州洗车机传感器ESP和CEP产品的应用有何不同?让我们从现在开始。大多数用ESP产品构建的应用程序似乎都关注于诸如count、sum、average、maximum、minimum、top-k或bottom-k这样的聚合。例如,它们可能被用来计算在一个时间窗口中某个主题的tweet的数量;或者在30秒的时间段内,通过多个传感器读数的平均值来报告机器的温度。这些基于聚合的事件层次结构比使用模式检测(通常与聚合结合)的原始CEP应用程序中的层次结构简单得多。通过适当的编程,ESP产品可以用于关联来自不同流的事件、检测缺席事件(在时间窗口内没有发生的事件)、搜索布尔组合(如a和B、a或B),甚至检测更复杂的模式。但是它们不使用水平因果关系(同一抽象层上的事件A导致事件B)或独立性(A独立于B而发生),这可能是因为当前用于ESP的商业应用程序集不用于诊断复杂的场景,通常不需要复杂的事件模式。
现货洗车机传感器多功能——配备工业级温湿度传感器,可实现对环境温湿度毫秒级实时测量,并以数字形式通过显示屏直观显示出来。让用户对环境温湿度“心中有数”,直观感知。设备具备手动和自动两种测量模式,10s-24h最小到秒的采样率,用户可根据实际需要进行设置,非常方便。支持32000组温湿度数据测量(即温度和湿度各32000个检测数据),可记录最大值、最小值、平均值、MKT值等重要参数数据,无需打开软件,可直接生成导出PDF文档报告。
P+F洗车机传感器1 目标空间定位流程虽然监控相机数量呈爆炸性增长的态势,但在现实生活中,监控相机的视域很少能存在大面积的重叠。因此,大部分监控场景都属于单目情况。相机成像的过程会造成深度信息的丢失,从二维图像确定目标的三维地理位置,需要借助地形信息。流程如图 1所示。图 1 监控视频动态目标空间定位流程图选项 (1) 在监控区域三维地理模型的基础上,获取该区域高精度的数字表面模型(DSM)。(2) 完成相机标定,确定相机的内参(焦距、像主点坐标、畸变系数等)和外参(旋转矩阵和平移矩阵),从而确定相机的成像模型。(3) 获取监控视频动态目标的像素坐标并进行畸变校正。(4) 构造目标点成像空间直线,将成像空间直线与DSM求交,交点即为监控目标的地理位置。(5) 当监控区域大范围比较平坦或可以分割为不同平面时,目标的空间定位可简化为基于平面约束的方法。2 目标定位算法2.1 相机的成像模型摄像机是三维世界和二维图像之间的一种映射,即可将世界坐标下的三维坐标点映射至二维平面,最具体和最简单的摄像机模型即基本的针孔摄像机[17]。假设空间一点M在世界坐标系下的坐标为(XW, YW, ZW), 其对应的像点在像素坐标系的坐标为(u, v),透视投影公式为(1)式中,(u0, v0) 为像主点坐标;fx、fy为相机焦距;s为扭曲参数;K为内参矩阵,可以通过相机内参标定获取;[R|t]为相机的外参矩阵,表示相机在世界坐标系中的方向和位置,可以通过相机外参标定获取;λ为比例因子。2.2 基于DSM的目标定位算法DSM是指包含了树木、桥梁和各种建筑物等高度的地面高程模型,没有解析表达式,用一组有序数值阵列表达地表起伏。对于标定过的相机,当已知目标的像素坐标和监控区域的DSM模型时,可采用遍历搜索的方法实现监控目标的定位(如图 2所示)。具体的定位解算步骤如下。图 2 基于DSM的目标定位原理图选项 (1) 确定相机视域的最高点M1(X1, Y1, Z1)和最低点M2(X2, Y2, Z2)。在DSM中确定相机视域范围内最高点高程Zmax和最低点高程Zmin,同时获取目标的像素坐标(u, v),代入式(1),即可确定最高点M1(X1, Y1, Z1)和最低点M2(X2, Y2, Z2)。若最高点高程大于相机中心点高程,即Zmax>Zcam,取Zmax=Zcam。(2) 构造目标点成像空间直线,公式为(2)(3) 搜索目标点。在M1M2之间沿着该目标点成像空间直线进行搜索,沿X方向搜索的步长为ΔX, 则(3)将式(3)代入式(2),即可确定搜索点Si(Xi, Yi, Zi)。将DSM中(Xi, Yi)处的高程记为Ei(Xi, Yi),简写为Ei。Ei(Xi, Yi)可通过式(4)求平均值确定。假设(Xi, Yi)所处格网的4个角点的高程分别为Z1、Z2、Z3、Z4,则(4)当首次出现Ei≥Zi时,说明经过了目标点。若Ei=Zi,则搜索点Si(Xi, Yi, Zi)即为目标点;若Ei>Zi,则目标点位于搜索点Si(Xi, Yi, Zi)和Si-1(Xi-1, Yi-1, Zi-1)之间,需要进行内插处理。(4) 内插确定目标点。当Ei-1 < Zi < Ei时,为精确确定目标点,按式(5)进行内插处理,其中ΔX、ΔY分别为沿X、Y方向搜索的步长。(5)因此,当Ei(Xi, Yi)=Zi时,目标点为搜索点Si(Xi, Yi, Zi);当Ei-1 < Zi < Ei时,按式(5)确定目标点。基于DSM的目标定位算法不受地理环境的制约,无论是平面、斜面,还是高低起伏的复杂地理场景,都可以实现监控目标的地理定位。在城市地区,大部分的区域都是平面,且单相机的视域范围较小,在相机的有限视域范围内大范围为平面。因此,监控目标的地理定位可按平面约束的方法进行计算。2.3 基于平面约束的目标定位算法令(6)式(1)可写为(7)将式(7)中的ZW改为Zh,Zh为相机视域中某平面的高程值,进行矩阵的运算并整理可得(8)式(8)即为Zh平面约束的映射模型,其实质是二维坐标转换,可以实现像素坐标和世界坐标的互相映射。当约束平面足够多时,二维的地理空间数据已近似于三维地理空间数据。3 试验3.1 DSM数据的生成某单位办公园区约180.0 m×204.8 m,使用网络RTK布设4个相控点,使用型号为大疆精灵4-RTK的无人机进行摄影测量。使用ContextCapture软件进行建模,生成该区域的三维模型。使用全站仪实测66个地面点,同时在三维模型上取对应点位坐标,采用均方根误差(RMSE)作为精度估计的评判标准,平面均方根误差为3.7 cm,高程均方根误差为6.5 cm,精度较高,满足试验要求。通过三维模型数据生成该区域的DSM数据,格网间距为5 cm。3.2 试验方案试验地点为某单位办公园区的一角,监控摄像头为大华高速智能白光球,型号为DH-SD-6C3230U-HN-D2,1/2.8英寸CMOS传感器,帧率为25帧/s,图像尺寸为1920×1080像素。在试验场地,在摄像机的视域范围内均匀布设了25个紧贴地面的标志点,该地面标志代表了25个监控目标在监控视频中的位置,同时布设了3个房角点(E1、E14、E23)和一个花坛点(E5)用于相机外参标定。全站仪实测29个标志点(如图 3所示)的三维地理坐标,同时在畸变校正后,拾取了29个标志点的像素坐标。图 3 29个目标标志点分布(畸变校正后)图选项 3.2.1 内参标定使用精度为0.01 mm,阵列为12×9,方格边长40 mm的氧化铝标定板,从不同角度录制视频,切帧选取了30张棋盘格照片。用张正友标定法[18]进行内参标定,剔除重投影误差较大的照片,最终选择平均重投影误差为0.14像素的16张棋盘格照片进行标定,标定结果如下。内参矩阵为径向畸变系数为[-0.005 7 0.618 3 -1.549 5],切向畸变系数为[0.000 1 0.000 4]。3.2.2 外参标定由于相机的视域范围较大,远处的标志点并不清晰,给提取标志点的像素坐标带来了困难。因此采用视频切帧的方式,抽取出测杆测量时的图像,共29帧。将29帧图像根据3.2.1中的标定结果进行畸变矫正后,提取测杆触地点的像素坐标。选取分布均匀且网形结构较好的7个标志点对(见表 1)进行EPNP+Iteration[19-20]解算,获取相机外参矩阵。表 1 图像坐标与世界坐标对应点对
滨州洗车机传感器作为一家科创板拟上市公司,睿创微纳的“科创含金量”如何?据招股书披露,睿创微纳拥有研发人员221人,占员工总数的37.39%,2016-2018年研发费用分别为 1794.43 万元、2675.89 万元及 6508.14 万元,占各年度营业收入比重分别为 29.78%、17.18%及 16.94%,而2016年和2017年可比上市公司研发费用率平均值分别为21.86%和17.53%。此外,睿创微纳目前已获授权共计87项涉及红外成像传感器热敏材料、器件结构和加工工艺的专利、14项集成电路布图设计权以及 37 项软件著作权。
现货洗车机传感器CoastalOpt 60 mm Apo的结果转换为中心的1,376 lppi,每帧高度的平均值为1,032 lppi,这是在36 Mpixel全画幅传感器产生的测试图像上测得的。如果我们认为这款镜头在全画幅上表现出色,那么任何在有效放大倍率下达到或超过其分辨率并具有良好附加性能(低像差,高对比度,良好的色彩校正,低失真)的扫描仪镜头都应该完全令人满意。微距摄影在全画幅上使用。
通过成功解决IMU与高精度三轴转台的坐标差异、设备信号输出非实时等问题。从将近51万组数据中提取出96组2s内特征数据平均值作为检测结果,最终圆满帮助企业攻下自动记忆泊车传感器的标定测试难关,助推无人驾驶技术创新发展。
为了弥补DMSP/OLS灯光数据空间分辨率低、高亮度区域灯光溢出等问题,美国国家海洋和大气管理局(NOAA)地理数据中心下属的地球观测组织发布了NPP/VIIRS灯光数据集,该数据集基于最新发射的Suomi-NPP(Suomi nation polar orbitingpartnership)卫星所搭载的可见光红外成像辐射仪(visible infrared imagingradiometer,VIIRS)。VIIRS传感器(day/night bands,DNB)波段合成的初始产品是无月光影响、15弧秒分辨率(地面约742 m)的高质量低感光的灯光数据。NPP/VIIRS较DMSP/OLS数据集在传感器敏感程度、空间分辨率、光谱响应方式、过饱和现象的去除等方面具有明显的优势[22]。本研究采用VIIRS是vcm版本月度合成数据,VIIRS/DNB月度产品虽然剔除了闪电、月光照射及云覆盖的影响,但没有去除极光、火光、船只灯光等短暂性光源和背景噪声,以致影像出现极大值像元与负值像元。为了剔除背景噪声影响,负值像元赋予0值,极大异常值像元选择乌鲁木齐市中心区域夜间灯光强度最高值作为最大灯光强度阈值,对非城镇中心区域超过最大阈值的灯光强度直接赋值为该地市城区的最大灯光强度阈值,并采用较为通用的平均值合成的办法合成年度数据,而后重采样处理得到与DMSP/OLS数据空间分辨率一致的灯光数据集。由于夏季夜间灯光亮度易受植被影响且高纬度地区有数据缺失的问题,平均值合成过程中没有使用夏季月份数据。为使来源于不同传感器的时间序列夜间灯光数据具有可比性,本文对DMSP/OLS数据集和NPP/VIIRS数据集进行了一致性校正。
便携式CO分析仪【霍尔德HED-HW100】是我厂新推出的一种利用红外光谱吸收原理,对低浓度的一氧化碳测量仪器,红外一氧化碳检测仪,同时可以检测一氧化碳浓度、温度和湿度。具有非常清晰的彩色触摸屏,声光报警提示,带内置泵,红外一氧化碳气体分析仪广泛用于公共场所、卫生监督、环境监测、疾控部门等气体的检测与监测。成功解决了,在高温和低温测量中的精度保证和补偿、精度非常的高,可用于科研等监测部门。 仪器特点: 1、检测空气中的一氧化碳气体浓度,同时可以检测该环境的温度和湿度。 2、采用高精度红外传感器,测量精度高、响应速度快、预热时间短; 3、支持氮气校零和催化校零两种方式; 4、具有机内恒温加热功能,适合户外低温环境下运行; 5、内置调零过滤器,可在不用外接零气的条件下进行传感器调零,使用方便; 6、具有温湿度测量功能、内置温湿度补偿修正算法,消除温湿度变化对测量数据的影响; 7、自带吸气泵可将数十米距离外的气体吸入仪器进行测定。 8、7英寸电容触摸屏,测量数据具有数字显示和仪表盘显示两种模式,数据显示直观,操作方便快捷。 9、仪器显示有PPM和mg/M³两种显示数据,可以自动转换。 10、自动零点校正技术,方便用户在不同季节和时间,进行零点修正。 11、具有瞬时值,平均值,30分钟平均值,8小时平均值,24小时平均值,存储功能。 12、仪器自带数据存储,储存数据可达10000组,可以直接查询检测数据。 13、带有USB数据接口,可以将数据导入电脑。 14、采用进口采样泵,负载能力强,使用寿命长;
其中V是测试期间应变传感器的电压,V0是静态站立姿势下测试之前应变传感器的初始电压。在下文中,使用ΔV/ V0估算实际角度。然后,通过减去平均值并除以标准偏差,对从应变传感器获得的数据进行归一化。训练和测试数据集分别进行了标准化,以保持测试数据不可见。然后使用Savitzky-Golay滤波器[35]平滑数据,窗口长度为31帧,阶数为5。根据经验选择滤波器的参数,以消除噪声并保持信号的主要模式。