P+F洗车机传感器为获得当前关节转动角度,需要实时显示采集6个关节转角值和测头三维坐标位置及6个关节速度。为实现对被测点坐标数据进行误差实时补偿,测量软件需要具备误差补偿功能。将采集的6个关节转角数据、速度、加速度和标定得到的杆长、偏置值、扭转角,代入由MATLAB软件编写的误差补偿程序,算出点位误差、标准偏差和平均误差,从而实现三维坐标的实时补偿,并将补偿前与补偿后的三维坐标数值同步显示在软件界面中,便于后续误差补偿效果对比。

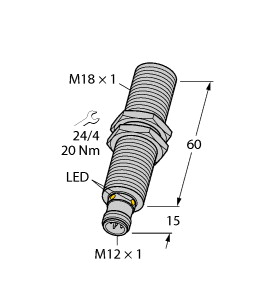
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
潍坊洗车机传感器检测开关柜内易发热的触头、母线接头设温度检测点。进线开关柜内设9个测点,另检查进线封闭母线或进线电缆端子温度。所测温度能够独立测温且在现场安装的操作面板上可显示实际测量温度,并上传在集中监控主机上,显示所有被测点的实时温度,以便在故障发生之前及时、准确的监测它们的温度变化并发出预警,有效的避免发生事故或引起火灾。
报价洗车机传感器海塞姆科技自主研发的DIC视觉跟踪仪,采用国际领先水平的斜光轴DIC技术,可实现对多个被测点的运动轨迹进行实时、高精度跟踪,可获得外载荷作用下大型工程结构上的被测点(亚像素精度的)水平和竖直方向位移量。
P+F洗车机传感器前端的传感头由小体积的无源的SAW传感器组成,可以方便安装在被测点上,准确的跟踪发热点的温度变化,并以无线方式将数据传到采集器上,采集器将收集来温度信号重新打包,发送至后台监控系统,实现对高压带电体的运行温度的非接触温度测量和实时监控。系统可运用于单个变电站中从后台实时监测该变电站所有监测点的温度变化;也可运用在多个变电站中,由后台监控所有被监控变电站中监测点的温度变化。下图为烽火富华电气有限公司完整的SAW无源无线温度监控系统方案图。
潍坊洗车机传感器(2)测头触发延时造成的误差 三坐标测量机在进行测量时,是用测针的宝石球接触被测工件的测量部位,此时测头(接触传感器)发出触测信号,该信号进入计数系统后,将此刻的光栅计数器锁存并送往计算机,由于手握操纵盒时的惯性作用,宝石球在接触被测工件后测头还要继续向前移动--小段距离 L,这样计算机采集到的坐标值就偏离了实际值,如图(1一2)。为了消除手动模式下给测量结果带来的偏差,在检测的过程中尽可能的采用自动模式,在自动模式下,测头可根据零件的实际情况按照计算机的指令沿法矢方向去触测被测点,要采用自动模式,首要的问题就是建立工件坐标系。
报价洗车机传感器在保证待测模具的平面度和同心度状态下,调整转动电机和垂直位移电机,使得激光感测头位于被测点上方的已知胎口直径位置。调整水平位移电机,使得激光感测头与胎口被测点的水平距离为 80±0.5 mm,激光传感器在这个距离下测量精度最高。
三维激光扫描仪的测量原理普通非接触式三维扫描仪,需要用到的主要硬件包括工业相机、光源、标定板、三脚架及云台。三维激光扫描测量的原理是光学三角形法,利用具有规则几何形状的激光源投影到被测表面上,形成的漫反射图像在安置于空间某一位置的图像传感器成像,按照三角形原理,即可测出被测点的空间坐标。
测量被测物体的相对位移,在固定点与被测点用柔性铟钢丝连接。钢丝一端固定在被测点上,另一端与位移计内部结构件相连;当被测点发生位移时,钢丝通过拉动位移传感器内的测杆,测杆位置发生变化后,围绕测杆外的线圈输出的电感频率也会相应发生变化。经过数据处理从而实现测量位移变形的目的。具有位移微小变化量,精度高、稳定性好的特点。
高精度四合一土壤检测仪为土壤检测提供方便很多人没有接触到高精度四合一土壤检测仪,高精度四合一土壤检测仪到底是检测什么呢?高精度四合一土壤检测仪采用一体化结构设计,外置SD卡,能准确的测量出被测地点的土壤温度、水分、盐分、PH,一键上传被测点的环境因子测量数据等。仪器体积小,便于携带检测,仪器具有多通道自动检测扩展功能,可以实现多个传感器同时接入的同步检测,高精度四合一土壤检测仪为土壤检测提供便捷化服务。
压力变送器产品广泛应用于钢铁、化工、造纸、污水处理、自来水、热力、电力、食品、有色等行业。罗斯蒙特变送器的行业应用:3051系列变送器是目前世界上最好的变送器,精度为0.075%。量程比为100:1。稳定性:0.1%一年、0.25%五年。到目前为止,没有一种变送器能全面达到这样好的指标。罗斯蒙特公司宣传3051是“隐形变送器”。因为3051有非常好的可靠性和稳定性。安装调试好以后,在五年左右时间内,基本不会有什么问题,几乎没有标定,维修的工作量。象不存在一样,所以叫“隐形变送器”。我们使用罗斯蒙特3051变送器的经验是:1.高度的可靠性在安装调试投入使用的近两年时间内,四百多台3051变送器经受了考验,在各种各样的应用中,没有一台出现过问题,保证了我们试车、生产的顺利进行。所以我们对3051变送器的质量感到满意和放心。2.极好的稳定性变送器的测量会随着环境温度、过程温度、静压的变化而发生漂移,如果在一些微小的压力、差压测量场合,这个漂移很可能是比较严重的,会存在一个很大的误差。但3051变送器由于具有独特的传感器结构,摩托罗拉专用芯片的电子制造工艺,使得这种漂移降到很低的程序(0.2V度,0.2p公斤)。很好地解决了漂移的问题。根据我们的使用经验。3051变送器在不同的工作条件下,能得到相对最正确的测量。从而维护了生产的稳定,保证了工艺的一致性。 3.100:1的量程比大大增加了3051变送器使用的灵活性3051变送器具有100:1的量程比。给设计、使用带了很大的方便。 a.我们的工艺流程由外方提高,设计中条件经常有变化,但由于3051有大的量程比,有很好的通用性。工艺条件的变化基本不影响变送器的型号。大大简化了设计修改的工作量。 b.100:1的量程比大大减少了工程中所用变送器的型号(差压变送器两种,压力变送器三种)。和普通变送器相比,型号要减少三分之一。 c.100:1量程比也大大减少了备品备件,也减少了库存,减少了资金的积压。 4.完整的产品系列 压力变送器除了可以测量压力外,还可以衍生出很多用途,比如利用差压变送器测量流量,利用液体的重力测量液位(静压式液位计)。测量流量罗斯蒙特差压变送器除了测量两个被测量压力的差压值外,它还可以配合各种节流元件(如孔板)来测量介质流体的流量。测量液位静压液位变送器的工作原理是:液体中某一点的静压力与该点到液面的距离成正比,即:P=ρgh。其中:P-被测点的压力(压强)、ρ-介质密度、g-重力加速度、h-被测点到液面的高度。对已确定的被测介质ρ,g为常数,故被测点到液面的位置的变化只与被测的P压力(压强)有关。在敞开容器内测量液位时,需要一台压力变送器即可。当测量密闭受压容器的液位时,可考虑用两台压力或者一台差压变送器,即测量下限一台,测量上限一台,它们的输出信号进行减法运算,即可测出液位,这时一般选用差压变送器。在容器内液位与压力值不变的情况下,它还可以用来测量介质的密度。