P+F洗车机传感器小派 VR3.0 Reality 支持所有追踪技术,包括 6DOF 头手追踪、眼动追踪、面部识别、全身 追踪,允许用户像一个自然人一样存在于元宇宙中。 Pimax Reality 12K QLED 最高搭载 11 枚定位及追踪摄像头,采用 inside-out 空间定位,内臵眼球追踪,并通过扩展模组实现完整的面部表情捕捉,在元宇宙中重塑自我意识,希望能 实现生动的 VR 社交。 基于手柄的“6+6”头手交互为当前主流交互方式。定位技术的原理简单概括,就是“信号 源+传感器”,使用相应的算法计算出物体的位臵信息(包括三轴及旋转共六个自由度,6DOF)。 随着算法及算力的成熟,VR 设备从初期的 3DOF 向 6DOF 演进,如 Vive Focus 升级为 6DOF 手柄的 Vive Focus Plus;Oculus 推出首款 6DOF 一体机 Oculus Quest;Pico 将其 3DOF 的 Pico 小怪兽一体机升级为 6DOF 的 Pico Neo。目前手柄控制依然是主流,融合 Inside-out 6DOF 头动+ 6DOF 手柄交互的 “6+6”交互路线是主流方案,代表厂商包括 Oculus Quest、Pico、Nolo、Ximmerse 等。各厂商的 VR 手柄设计有较大不同,通常都会 配臵摇杆,小型触摸板,A、B 操作按钮,以及握柄部分的电容感测,可识别压力、触感、 以及光学数据。

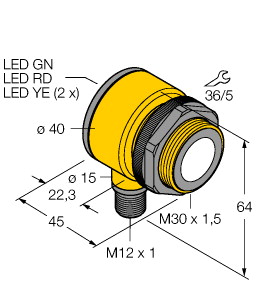
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
菏泽洗车机传感器按照官方的说法,在MDC智能驾驶平台上,昇腾芯片+智能操作系统是基础,通过传感器生态、智能驾驶应用生态和执行部件生态,将来实现智能驾驶。传感器生态方面,华为将自研激光雷达和毫米波雷达;智能驾驶应用生态方面,华为希望合作伙伴基于MDC,开发算法和应用;执行部件生态方面,华为希望打造接口标准,让MDC与执行部件更容易配合。
订货洗车机传感器Inside-out 是一种光学跟踪系统,基于计算机视觉技术(CV,Computer Vision),其原理是 以三角定位算法为基础,基于环境中设备自身的摄像头与传感器进行周边环境的实时动态感 知,并经过视觉算法(SLAM 算法)计算出摄像头的空间位臵数据,从而实现对目标的位臵 跟踪。 在 VR 设备中,主要是利用头显自身的摄像头或视觉传感器,让设备自己检测外部环境变化, 并经过视觉算法计算出 VR 头显的空间位臵。 而根据光源发射装臵(摄像头)数量,可分为多目视觉定位(如 Oculus Quest)、单目视觉 定位(如微软系列 VR 头盔)。对于多目视觉定位来说,因为多目传感器自身角度关系,既可 以进行静态的位臵估计,也可以进行动态的位臵估计。单目视觉定位则只能在动态环境中获 取不同时刻的目标图像,再根据坐标的变换进行位臵估算。当前主流的 VR 设备大多为多目 视觉定位。
P+F洗车机传感器 第一级包括从各种传感器和传感器集群收集的原始输入数据。 第二级包括过滤过程、传感器数据的时间和空间同步以及比较各种传感器输出的不确定性建模。 第三级包括对象检测和特征提取以生成对象的表示(例如大小、形状、颜色、速度等)。 第四级聚合来自第三级的输入以识别特定对象及其轨迹(或预期轨迹),以创建准确的环境动态模型。 特征的提取和聚合是成功传感器融合的关键活动。正在开发机器学习(ML)算法以比较各种融合方法并确定特定应用中给定传感器组的最佳解决方案。在一种情况下,ML使用:
菏泽洗车机传感器“截至今年6月底,智能重卡累计运输集装箱39296箱,累计自动驾驶总里程77.2万公里,其中开放道路自动驾驶总里程76万公里。”上汽智能重卡项目总工程师李忠欣说,上汽智能重卡已实现了特定场景下的L4级自动驾驶技术落地,基本具备全天候、全流程、多场景、有人/无人载运工具混行下的自动驾驶规模化运营能力。“去年底,智能重卡从两人监管切换到一人监管运营,具备了无人驾驶的基本条件。”李忠欣说,目前技术团队正进一步优化算法,重点攻关车路协同环境下多传感器的可信融合,“我们都盼着真正无人驾驶的那一天。”
订货洗车机传感器激光雷达兼具测距远、角度分辨率优、受环境光照影响小的特点,且无需深度学习算法,可直接获得物体的距离和方位信息,与其他传感器互补结合使用可帮助感知系统减小探测误差,因而被大多数整车厂、Tier 1 认为是L3级及以上自动驾驶必备的传感器。自2020年年底开始,各大车企陆续宣布激光雷达装车,2022年,蔚来ET7、理想L9、阿维塔11、智己L7、小鹏G9、极狐α-SHI等多款新车型上市,使激光雷达正式步入量产元年。根据Yole对不同自动驾驶等级对传感器需求的分析,L3级自动驾驶需搭载1个激光雷达,L4级搭载2-3个,L5级搭载4-6个。国海证券指出,2022年新车型普遍预埋L4级自动驾驶硬件,从选装到标配,引发硬件军备竞赛,激光雷达作为高级别自动驾驶主流方案核心传感器,正在迎来量产爆发期,与主机厂深度合作的公司在市场竞争中将占据优势。
SLAM是AR必备的核心技术,为了实现虚拟与现实的融合,在任意元素的定位和虚拟延展上都需要SLAM进行定位。目前苹果(ARKit)、华为(AR Engine)、Google(ARCore)推出的AR SDK均采用的是单目视觉+IMU融合定位的技术路线。目前也出现了各小公司在关键细分领域如传感器、软件、算法、硬件等方向的分化。各大巨头在不断投入研发之外,也在作出布局和收购的动作。
Inside-out 是一种光学跟踪系统,基于计算机视觉技术(CV,Computer Vision),其原理是 以三角定位算法为基础,基于环境中设备自身的摄像头与传感器进行周边环境的实时动态感 知,并经过视觉算法(SLAM 算法)计算出摄像头的空间位臵数据,从而实现对目标的位臵 跟踪。 在 VR 设备中,主要是利用头显自身的摄像头或视觉传感器,让设备自己检测外部环境变化, 并经过视觉算法计算出 VR 头显的空间位臵。 而根据光源发射装臵(摄像头)数量,可分为多目视觉定位(如 Oculus Quest)、单目视觉 定位(如微软系列 VR 头盔)。对于多目视觉定位来说,因为多目传感器自身角度关系,既可 以进行静态的位臵估计,也可以进行动态的位臵估计。单目视觉定位则只能在动态环境中获 取不同时刻的目标图像,再根据坐标的变换进行位臵估算。当前主流的 VR 设备大多为多目 视觉定位。
另外,滤网作为空气净化器产品净化的核心,通常厂商都会推荐一个更换周期,该周期仅是一个参考值,用户还需要根据自己使用的实际情况决定是否更换,或者结合制造商的相关提示,确定实际更换的时间。高档的净化器会记录用户的使用偏好(习惯)和使用环境,自动预测更换/维护滤网的时间,或者通过先进传感器,检测出滤材的实际寿命。至于提示是否准确,与传感器的精度和算法有关系。但厂家对此类传感器一般都会留有一定余量,用户可根据此类提示进行更换。
小派 VR3.0 Reality 支持所有追踪技术,包括 6DOF 头手追踪、眼动追踪、面部识别、全身 追踪,允许用户像一个自然人一样存在于元宇宙中。 Pimax Reality 12K QLED 最高搭载 11 枚定位及追踪摄像头,采用 inside-out 空间定位,内臵眼球追踪,并通过扩展模组实现完整的面部表情捕捉,在元宇宙中重塑自我意识,希望能 实现生动的 VR 社交。 基于手柄的“6+6”头手交互为当前主流交互方式。定位技术的原理简单概括,就是“信号 源+传感器”,使用相应的算法计算出物体的位臵信息(包括三轴及旋转共六个自由度,6DOF)。 随着算法及算力的成熟,VR 设备从初期的 3DOF 向 6DOF 演进,如 Vive Focus 升级为 6DOF 手柄的 Vive Focus Plus;Oculus 推出首款 6DOF 一体机 Oculus Quest;Pico 将其 3DOF 的 Pico 小怪兽一体机升级为 6DOF 的 Pico Neo。目前手柄控制依然是主流,融合 Inside-out 6DOF 头动+ 6DOF 手柄交互的 “6+6”交互路线是主流方案,代表厂商包括 Oculus Quest、Pico、Nolo、Ximmerse 等。各厂商的 VR 手柄设计有较大不同,通常都会 配臵摇杆,小型触摸板,A、B 操作按钮,以及握柄部分的电容感测,可识别压力、触感、 以及光学数据。