P+F接近开关智能制造。聚焦智能机器人、无人机和智能装备等,加大产业前沿及底层正向研发技术支持力度,形成“北京智造”品牌,打造具有全球影响力的智能制造产业创新策源地。智能机器人领域重点打造仿人和仿生机器人共性技术平台,加快医疗健康机器人、特种机器人、仓储物流机器人等整机研发和关键技术突破,仿人机器人重点研究人体肌肉-骨骼刚柔耦合、多模式运动智能自主适应、双臂协同拟人化多任务作业等技术,研制刚柔机器人关节、智能仿生视觉-力觉感知单元、灵巧操作手臂等;仿生机器人重点研究仿生灵巧机构与结构设计、动态感知越障规划、多模步态生成与稳定控制等技术,研制柔性电驱关节、行走智能控制器、智能能量管理系统等;异构协同重点突破新型多机器人控制器、多传感器协同融合、多机器人智能核心控制等技术,实现异构、人-机混合多智能协同。无人机领域重点研究仿生飞行、多栖跨介质飞行、临近空间飞行、新能源高效动力与能量管理、动态场景感知与自主避让、群体作业与异构协同等关键技术。智能装备领域面向高端装备、航空航天、生物医药、新能源智能网联汽车、电子信息、数控加工等行业,聚焦通用关键零部件、智能生产线、“黑灯工厂”以及协同制造等重点方向,推动高性能敏感器件、模拟芯片、数据融合、设备互联互通、工艺流程优化与控制等底层关键技术突破,以及数字孪生、边缘计算、系统协同控制等共性技术集成创新。科学仪器与传感器领域瞄准4D时间分辨超快电镜技术、光子超精密制造、智能微系统等领域开展协同攻关。

(P+F 电感式传感器 NBN12-18GM50-E0-M)
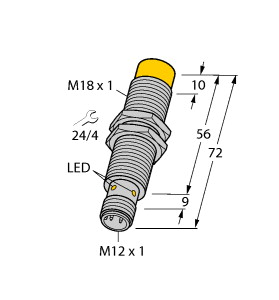
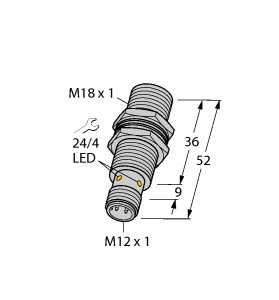
12 mm,非齐平,温度范围扩大
-40 ... +85 °C,E1 型式批准,抗扰度提高至 100 V/m,密封性增强,防护等级
IP68 / IP69K,出色的耐冲击和防振性能
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,4 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 5 ... 60 V 开关频率 : 0 ... 1500 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 感应过电压保护 : 是 浪涌抑制 : 是 电压降 : ≤ 2 V 额定绝缘电压 : 60 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 0,1 µA 在 25 °C 时 空载电流 : ≤ 7 mA 可用前的时间延迟 : ≤ 220 ms 开关状态指示灯 : 黄色 LED MTTFd : 1085,5 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证,一般用途,2 类电源 CSA 认证 : 通过 cCSAus 认证,通用,2 类电源 CCC 认证 : 通过中国强制性产品认证 (CCC) E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 PUR , 2 m 线芯横截面积 : 3 x 0.75 mm2 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 质量 : 132 g
济宁接近开关东电科技相关负责人表示,可穿戴式绝缘助力臂机器人能够自主判断、识别人体上肢手臂运动意图,并通过机电信号及智能传感器,控制助力臂为人体提供必要的助力辅助,机器人单臂可为人体上肢提供20千克助力,为双臂提供40千克助力,产品设计规格满足1.55米至1.85米的不同体型人员穿戴。目前,该产品主要应用于10千伏至500千伏电压等级的运维和检修作业中,能够增强作业人员的手臂负载能力,减少肌腱和关节腰肌劳损,降低安全生产风险,解决部分人员不能完成接地操作的困难,提升管理效率,让接地线人人皆能轻松操作,助力电力行业智能化、机械化、高效化。
含税运接近开关 在日前举办的第六届中国机器人峰会上,一款灵智双臂协作机器人吸引了参会者的眼球,热锅、放食材、倒调料、翻炒、出锅装盘……它以娴熟的技巧不知疲倦地一遍遍模拟着炒菜。据了解,该双臂机器人是由两个7自由度的冗余机械臂组成,末端集成视觉、力传感器等多种传感器,形成了实时闭环系统,能够实现以手臂的智能路径规划。该机器人可用于装配、搬运、点胶、打螺丝钉等场景,轻量化仿人手臂可集成冰激凌机器人、咖啡机器人等无人贩卖机。
P+F接近开关智能制造。聚焦智能机器人、无人机和智能装备等,加大产业前沿及底层正向研发技术支持力度,形成“北京智造”品牌,打造具有全球影响力的智能制造产业创新策源地。智能机器人领域重点打造仿人和仿生机器人共性技术平台,加快医疗健康机器人、特种机器人、仓储物流机器人等整机研发和关键技术突破,仿人机器人重点研究人体肌肉-骨骼刚柔耦合、多模式运动智能自主适应、双臂协同拟人化多任务作业等技术,研制刚柔机器人关节、智能仿生视觉-力觉感知单元、灵巧操作手臂等;仿生机器人重点研究仿生灵巧机构与结构设计、动态感知越障规划、多模步态生成与稳定控制等技术,研制柔性电驱关节、行走智能控制器、智能能量管理系统等;异构协同重点突破新型多机器人控制器、多传感器协同融合、多机器人智能核心控制等技术,实现异构、人-机混合多智能协同。无人机领域重点研究仿生飞行、多栖跨介质飞行、临近空间飞行、新能源高效动力与能量管理、动态场景感知与自主避让、群体作业与异构协同等关键技术。智能装备领域面向高端装备、航空航天、生物医药、新能源智能网联汽车、电子信息、数控加工等行业,聚焦通用关键零部件、智能生产线、“黑灯工厂”以及协同制造等重点方向,推动高性能敏感器件、模拟芯片、数据融合、设备互联互通、工艺流程优化与控制等底层关键技术突破,以及数字孪生、边缘计算、系统协同控制等共性技术集成创新。科学仪器与传感器领域瞄准4D时间分辨超快电镜技术、光子超精密制造、智能微系统等领域开展协同攻关。
济宁接近开关 ABB的协作机器人有双臂YuMi和单臂Roberta。YuMi整体重量 38kg,单臂7轴冗余设计(双臂14轴),有效负载 0.5kg,臂展500mm,外接IRC5控制器、支持拖动示教。主要是针对微小零部件组装。Roberta原为协作机器人公司Gomtec,于2015年初被ABB收购。Roberta是一组模块化6轴机器人,有定制无刷电机和谐波传动,还能附加安全传感器和关节转矩传感器。
含税运接近开关(在日前举办的第六届中国机器人峰会上,一款灵智双臂协作机器人吸引了参会者的眼球,热锅、放食材、倒调料、翻炒、出锅装盘……它以娴熟的技巧不知疲倦地一遍遍模拟着炒菜。据了解,该双臂机器人是由两个7自由度的冗余机械臂组成,末端集成视觉、力传感器等多种传感器,形成了实时闭环系统,能够实现以手臂的智能路径规划。该机器人可用于装配、搬运、点胶、打螺丝钉等场景,轻量化仿人手臂可集成冰激凌机器人、咖啡机器人等无人贩卖机。 本报记者 周岩 摄)
重要研发项目的进展及影响 1、工信部2016年智能制造综合标准化项目“机器人制造数字化车间制造单元与工艺研究与标准验证”课题项目主要针对机器人数字化车间生产制造单元的标准化、模块化、柔性化技术展开研发;研究面向机器人制造行业数字化车间的参考型标准和机器人数字化制造的工艺闭环数据模型;针对数字化机器人制造车间生产制造工艺,研究工艺的验证方法,搭建机器人制造数字化车间标准验证试验平台;完成《机器人制造数字化车间制造单元与工艺》标准的编制,并对其进行有效性验证,在工业机器人生产线中进行示范应用,确保标准的可用性、科学性和可操作性,为后续标准的制修订提供规范性和科学依据。 目前,该项目完成了《机器人制造数字化车间制造单元与工艺》标准编制说明、标准研究报告和标准草案的编制;完成了机器人制造数字化车间标准试验验证平台的搭建,在机器人生产现场对整个车间的单元与工艺、运行管理、设备的互联互通操作以及功能安全和信息安全相关功能进行应用验证,形成验证平台建设总结报告、验证平台验证报告、现场验证总结报告和现场验证报告,现已完成课题所有研发任务,正在进行项目结题验收工作。 2、工业和信息化部工业强基工程项目“智能工业机器人实时操作系统及软件包实施方案”项目项目主要是面向智能型工业机器人应用领域,实现嵌入式ARM控制器、X86控制器和高性能多核控制器产品,解决机器人实时操作系统及高性能运动控制、弧焊、点焊、力控制、视觉等软件模块,实现控制器产品在智能型工业机器人上应用,提高机器人运动性能,丰富机器人智能功能。建设嵌入式ARM控制器、X86控制器和高性能多核控制器三种控制器产品的生产线,在控制器基础上搭建机器人操作系统,实现12种以上的软件模块和应用软件工艺包,搭建产品测试验证平台,对控制器性能和功能进行测试,提高国产机器人市场竞争力,实现机器人控制器批量化生产与产业化应用。 目前,该项目完成了嵌入式ARM、X86和高性能多核控制器的开发,并开发了基于Linux的实时操作系统;完成了机器人运动控制、轨迹规划、视觉、力觉、点焊弧焊、码垛等12种以上的软件模块和应用软件工艺包开发,并完成各模块单元测试与验证;搭建并建设了双臂、焊接、打磨、装配、移动等智能工业机器人验证平台和嵌入式ARM、X86、高性能多核控制器产品生产线;完成了控制器在智能工业机器人上的性能与功能验证,提高了机器人运动性能,丰富了机器人智能功能,提升了国产机器人市场竞争力,实现了国产机器人控制器产品的批量生产与产业化应用,现已完成所有研发任务,正在申请项目结题验收。 3、发改委“新一代信息基础设施建设工程和互联网+”重大工程“工业机器人智能系统关键技术研究与应用”项目项目主要是依托新松公司智慧产业园柔性智能制造装备中心,开展工业机器人智能技术验证、产品开发与应用推广等工作,参加工业机器人智能系统关键技术攻关。该项目围绕新一代智能工业机器人的相关新理论、新方法,研究攻克机器人视觉识别定位、智能控制、互联网环境下的信息模型等共性关键技术;研制开发负载能力分别为10kg、20kg和50kg三种型号的新一代工业机器人产品,其核心零部件与整机通过国家机器人检测与评定中心(沈阳)测试;重点针对焊接、磨抛和机加等工业机器人典型应用领域的生产需求,将工业机器人智能系统的核心共性技术与面向具体行业的特殊应用相结合,研究专门的智能工艺系统,实现新一代智能工业机器人产品在换热器管线焊接、油烟机罩磨抛和三槽壳/钟形壳机加等自动化生产线上的推广应用。 目前,已完成面向焊接、磨抛和机加工等典型应用领域生产需求的负载能力分别为10kg、20kg和50kg三种具有自主知识产权的新一代工业机器人产品开发,搭建了智能点焊、磨抛、弧焊、多机器人协同作业、装配、搬运与码垛等机器人测试系统。基于开发的10kg、20kg和50kg工业机器人产品,完成了焊接、机加工和磨抛机器人智能工艺系统研究;完成了MES系统、自动化立体仓库建设和企业信息化软硬件升级;建立了焊接、机加工、磨抛机器人自动化生产线,实现了10kg、20kg和50kg新一代智能工业机器人在焊接、机罩磨抛和外壳机加等领域的推广应用,生产线综合效率提升30%以上。现已完成项目研发,正在进行关键技术研究报告的编制工作。 4、十三五国家重点研发计划“公共安全风险防控与应急技术装备”专项“无人应急救援装备关键技术研究与应用示范”项目项目面向重大事故灾难、自然灾害等突发事件中地面伤员抢运、空中环境侦测、海上紧急救助的实际需求,攻克地面伤员自主搜寻与定位、无人机高升阻比气动外形设计、无人船恶劣海况适应性、间歇遮蔽信道通讯与导航等关键技术,研制伤员抢运地面无人救援机器人、远程空中应急无人机及海上救助无人船装备,开展典型场景的范应用,推动应急救援装备技术和标准体系的建立。 目前,该项目完成了海陆空和信息化无人应急救援装备标准前期调研工作,确定了地面废墟搜救机器人通用技术条件、应急无人机整机试验方法、无人船海上救助应急预案编制导则等10项拟编制的无人应急救援装备相关国家/行业标准,现已完成2项标准发布、1项标准报批、6项标准正在立项和草案编制阶段;完成了地面伤员抢运机器人、远程空中应急无人机和海上救助无人船三大应急救援装备所有核心关键技术攻关、软硬件子系统开发与集成、工程样机开发、系统联调、测试及改进和应用示范方案的制定与环境初步搭建;为后续海陆空无人应急救援装备系统的功能、性能测试验证和示范应用提供了技术及平台支撑。 5、十三五国家重点研发计划“重大科学仪器设备开发”专项“工业机器人整机综合性能测试仪”项目项目针对机器人整机运动精度、控制系统性能、关节驱动性能、人体碰撞安全等测试需求,攻克基于立体视觉的空间六维位姿测量、机器人末端运动非接触式动态跟踪测量、多目标运动跟踪算法等关键技术,开发测量软件,研制机器人运动性能测量仪;攻克多轴同步实时测量、伺服精度与空间插补精度测量、实现单轴伺服性能测试等关键技术,研制机器人控制系统测试台;攻克关节测试的同步驱动与高精度动态自由加载、可变复杂工况的关节负载模拟等关键技术,研制驱动传感同步动态采集分析系统与关节测试台;攻克机器人-人体等效碰撞模型、机器人运动终止检测、机器人-人体运动等关键技术,研制人体碰撞安全评估系统。最终完成各测试台及系统的应用验证和集成开发,研制一整套具有自主知识产权、稳定可靠、视觉等核心部件国产化的工业机器人整机综合性能测试仪,并实现其产业化发展。 目前,该项目完成了所有有关工业机器人控制器测试台、运动性能测试仪、关节驱动性能测试仪和人体碰撞安全评估系统的工业机器人整机综合性能测试仪的软硬件关键技术攻关,解决了仪器开发过程中的关键技术难题,形成了仪器研制的详细设计方案,完成了核心软件模块及框架的编写,现已完成4套测试仪原理样机的成果转化和工程化开发、4套仪器功能和性能测试验证平台搭建;形成了2项企业标准、1项质量与可靠性企业规范初稿、1套仪器测试及验证大纲和1项产业化实施细则编制;为后续仪器应用验证、异地测试、第三方测试、示范应用和产业化推广提供了技术、标准和产品支撑。 6、十三五国家重点研发计划“重大科学仪器设备开发”专项“高分辨率角位移传感器研制与产业化”项目“可靠性设计及产品验证”课题项目通过高分分辨率角位移传感器在测试验证平台上进行的性能测试和整机长期运行可靠性测试,验证角位移传感器在机器人整机上的综合应用性能和设计可靠性。进行高分辨率角位移传感器可靠性设计、可靠性平台设计及产品验证和在线数据收集与产品优化设计,最终完成产品验证,为产品的改进和性能提升提供依据。 目前,该课题已完成“高分辨力角位移传感器”样机质量与可靠性总体方案和可靠性检验平台设计方案的编制;完成了“高分辨力角位移传感器”可靠性机器人验证平台(6轴,负载50kg)和机器人整机综合性能测试平台(重复定位精度、振动、温升、动力特性和轨迹特性测试)的搭建。目前,正准备进行机器人核心零部件可靠性强化试验。该验证及测试平台的搭建,实现了高分辨力角位移传感器在机器人整机中的应用性能对比测试和搭载角位移传感器的机器人性能参数的在线数据监测,为后续评价传感器对机器人整机性能影响、传感器与机器人本体结构的进一步优化和传感器产品稳定性及可靠性提升与改进,提供数据支撑及改进依据。 7、十三五国家重点研发计划“智能机器人”专项“机器人操作系统及开发环境研究与应用验证”项目“机器人操作系统应用验证”课题本课题以机器人操作系统的整体架构和统一运行环境为基础,在图形化的集成开发环境中进行各类机器人应用软件包的开发,搭建各类机器人的应用平台验证机器人操作系统各项功能和性能指标。由5家主机厂的开发人员在机器人操作系统运行框架的标准下、图形化集成开发环境中完成工业机器人、服务机器人、特种机器人的9种应用软件包:码垛、打磨、装配、焊接、机床上下料、冲压、喷涂等工业机器人工艺软件包;顾客引导等服务机器人应用软件包;地面侦查等特种机器人应用软件包。基于模型计算、轨迹规划、导航定位等多种通用机器人算法,研发各类机器人的不同应用功能。本课题将基于机器人操作系统和不同架构的硬件平台(ARM、X86),结合不同种类的机器人系统、外部设备和应用软件包,对本项目研究成果在5家课题参与单位的码垛、打磨、装配、焊接、上下料、冲压、喷涂、引导、地面侦查等9类机器人中进行应用验证。该项工作将充分验证机器人操作系统各项功能、性能指标,为本项目研发的机器人操作系统在国内机器人行业推广应用和产业化奠定扎实基础。 目前,基于项目组开发的机器人操作系统运行框架标准和图形化集成开发环境,课题现已完成焊接、打磨、冲压、机床上下料、装配、喷涂、码垛、引领和巡检等,共9种机器人工艺软件包的开发;基于机器人操作系统和ARM、X86架构的硬件平台,完成了焊接、打磨、冲压、机床上下料、装配、喷涂、码垛、引领和巡检等,共9种机器人操作系统应用验证平台搭建的总体方案设计,定义了软件框架、各通用模块和应用模块的功能划分及调用关系;完成了以上工业、引领服务和巡检机器人系统和应用软件包的集成开发,搭建了应用验证平台及环境,为后续机器人操作系统应用验证提供了平台和场地支撑。 8、十三五国家重点研发计划“智能机器人”专项“面向敬老院的老人辅助机器人研制与系统集成示范应用”项目“老人情感陪护机器人研制”课题本课题针对老人的情感陪护和日常交流需求,攻克基于人脸识别的老年人情绪辨识技术、养老陪护领域的语音交互和情感识别技术、机器人自主移动技术、机器人远程通讯互动技术和路径规划算法优化技术,开发精度更高、稳定性更好的导航算法和基于无线通信技术的远程视听通讯功能;研制具有情感辨识、语音辨识、语义理解等功能及可靠定位导航系统的情感陪护机器人,开展情感陪护机器人检测、标准制定,并进行示范应用。小批量生产和市场推广。 目前,课题已开展并完成了老人情感陪护需求调研和老人情感陪护机器人的方案设计,正在编制产品标准;完成了人脸识别系统、人脸表情识别算法、自主移动及路径规划算法、基于语音声学特征与情感模式的相关性和基于语音数据库的情绪识别等老人情感陪护机器人关键技术攻关,实现了机器人产品原理样机的开发与成果转化,为后续工程化改进、示范应用和市场推广奠定了产品基础。 9、十三五国家重点研发计划“智能机器人”专项“机器人系列化高精度谐波减速器开发及智能制造示范”项目“机器人谐波减速器系统匹配性及全生命周期性能评估研究”课题课题主要研究机器人谐波减速器系统匹配性及兼容性,谐波减速器全生命周期性能评估方法与手段;建立谐波减速器机器人综合性能测试平台,对安装在机器人整机上的国产减速器和进口减速器的应用性能进行关键指标对比测试,评价国产和进口减速器在整机上的性能表现;对安装国产谐波减速器的机器人进行整机测试,进行系统优化设计;实现国产谐波减速器在新一代工业机器人、服务机器人等不同领域的规模化应用。 目前,基于项目组开发的谐波减速器产品需求,课题已完成谐波减速器在线应用状态监测装置、谐波减速器全生命周期综合性能分析等关键技术的开发;针对机器人用谐波减速器的性能参数在线测控技术,完成了本地及远程服务器接口模块、传输技术、10kg工业机器人本体和平台软硬件的开发,搭建了机器人综合精度测量平台;正在进行远程端操控平台、数据库和数据分析系统的开发及20kg工业机器人本体和综合精度测量平台的开发与搭建,为后续谐波减速器关键指标对比测试与优化设计提供平台支撑。 年度经营计划在报告期内的执行情况 1、协作机器人增长潜力巨大 公司加大人工智能技术在机器人应用的投入,目前市场化应用最典型的为协作机器人系列产品。报告期内,公司加深与汽车、家电以及医疗行业客户的合作,实现协作机器人装配、检测、搬运等多项应用。公司持续增强产品影响力,加大产品的市场投放和推广,拓宽下游行业应用领域。公司积极建设协作机器人生产基地,完善生产制造的配套体系,为协作机器人产业化发展提供支持。 2、机器人新兴市场需求增加 随着新兴市场需求的崛起,公司依托焊接、喷涂、装配、磨抛、搬码等应用,着力拓展工程机械、煤机、船舶等一般工业领域的市场,与上述行业内的多家领先企业形成战略合作伙伴关系。此外,公司针对3C等行业的市场特点,大力推广轻量化工业机器人,凭借高精度、高速度的作业优势已经获得持续订单。公司根据用户特殊生产环境要求,为其提供防爆型机器人产品,成功开拓新市场。 3、数字化工厂拓展行业应用 公司继续深化数字化工厂解决方案在集装箱、厨卫、核工业、3C等多个领域的应用。公司坚持与战略合作伙伴密切交流,围绕客户的行业特点开拓合作模式,深度开发相关领域的数字化工厂服务。智能物流市场需求持续增长,公司保持技术与产品的领先水平,在传统优势行业继续增加市场份额外,继续拓展智能家居、医药、新能源电池等新兴市场,且进一步扩大海外客户群规模,与国际一流的厂商比肩。 4、增强半导体装备综合实力 公司围绕标准化、平台化、国际化的发展战略应对日益增长的国内泛半导体设备需求,扩张公司半导体产业规模。公司基于既有技术与产品积累,拓展产品序列并开发新一代产品,同时结合市场需求加强平台化系统解决方案的开发,提升市场影响力。2019年,公司作为国内唯一的真空机械手供应商,承接科技部02专项定向发布的《双臂真空机械手等集成电路装备关键零部件研发及产业化项目》,旨在攻克国际一流的新型多轴真空机械手新构型设计及高速高精度低震动控制技术,研发双臂真空机械手系列产品,打破国外新技术壁垒。
这是新疆电网首次采用智能机器人在配电网运行线路上开展带电接引线作业,标志着新疆配电网不停电作业由传统人工方式逐步向“人机交互”模式转型。 该机器人采用国网瑞嘉公司研发的最新第8代操作系统,全自主作业成功率可达98%,配合了多传感器融合的定位系统,可实现对导线毫米级识别定位。它采用双臂配合,运用人工智能技术,可以规划作业路径,高效完成工作任务。
智能制造。聚焦智能机器人、无人机和智能装备等,加大产业前沿及底层正向研发技术支持力度,形成“北京智造”品牌,打造具有全球影响力的智能制造产业创新策源地。智能机器人领域重点打造仿人和仿生机器人共性技术平台,加快医疗健康机器人、特种机器人、仓储物流机器人等整机研发和关键技术突破,仿人机器人重点研究人体肌肉-骨骼刚柔耦合、多模式运动智能自主适应、双臂协同拟人化多任务作业等技术,研制刚柔机器人关节、智能仿生视觉-力觉感知单元、灵巧操作手臂等;仿生机器人重点研究仿生灵巧机构与结构设计、动态感知越障规划、多模步态生成与稳定控制等技术,研制柔性电驱关节、行走智能控制器、智能能量管理系统等;异构协同重点突破新型多机器人控制器、多传感器协同融合、多机器人智能核心控制等技术,实现异构、人-机混合多智能协同。无人机领域重点研究仿生飞行、多栖跨介质飞行、临近空间飞行、新能源高效动力与能量管理、动态场景感知与自主避让、群体作业与异构协同等关键技术。智能装备领域面向高端装备、航空航天、生物医药、新能源智能网联汽车、电子信息、数控加工等行业,聚焦通用关键零部件、智能生产线、“黑灯工厂”以及协同制造等重点方向,推动高性能敏感器件、模拟芯片、数据融合、设备互联互通、工艺流程优化与控制等底层关键技术突破,以及数字孪生、边缘计算、系统协同控制等共性技术集成创新。科学仪器与传感器领域瞄准4D时间分辨超快电镜技术、光子超精密制造、智能微系统等领域开展协同攻关。
据了解,机器人采用国网瑞嘉公司研发的第8代操作系统,全自主作业成功率可达98%,配合了多传感器融合的定位系统,可实现对导线毫米级识别定位。它采用双臂配合,运用人工智能技术,可以规划作业路径,高效完成任务。