P+F感应开关大众一直以来都很在意主动交互的细节,比如“靠近即响应”的大屏交互。由于大屏附近预埋了距离传感器,每次我的手一接近,屏幕就会自动调节亮度,或者将重要按键做动画高亮。这些都需要相应的硬件成本加持,并做好系统级的融合。

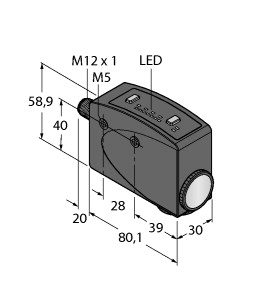
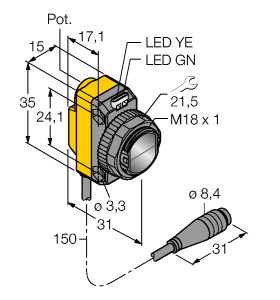
(P+F 聚焦型光电传感器 ML100-8-HGU-100-RT/102/115/162)
微型设计,带狭长光斑的漫反射型光电传感器,易于使用,光斑极为明亮、清晰,全金属螺纹安装
检测距离 : 10 ... 100 mm 调整范围 : 30 ... 100 mm 参考目标 : 标准黑色,100 mm x 100 mm 光源 : LED 光源类型 : 调制可见红光 偏振滤波片 : 无 光点直径 : 大约 6 mm x 60 mm 当 100 mm 发散角 : 发射器: 3,5 ° 垂直 ; 30 ° 水平 光学端面 : 向前直射 环境光限制 : EN 60947-5-2:2007+A1:2012 MTTFd : 860 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:通电 功能指示灯 : 黄色 LED: 检测到物体时亮起 控制元件 : 感应范围调节器 控制元件 : 亮时接通/暗时接通转换开关 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : < 20 mA 开关类型 : 该传感器的开关类型是可更改的。默认设置为: 亮时接通 信号输出 : 1 路 NPN 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 电压降 : ≤ 1,5 V DC 开关频率 : 500 Hz 响应时间 : 1 ms 产品标准 : EN 60947-5-2 EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证的 2 类电源,或具有有限电压输出且带(可以是集成式)保险丝(最大值为 3.3 A,符合 UL248 标准)的认证电源,1 类外壳 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -30 ... 60 °C (-22 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 11 mm 外壳高度 : 31 mm 外壳深度 : 20 mm 防护等级 : IP67 连接 : 2 m 固定电缆 材料 : 质量 : 大约 50 g 紧固螺丝的紧固扭矩 : 0,6 Nm 电缆长度 : 2 m
德州感应开关鼠标底部的脚贴采用了目前比较主流的上下两个大脚贴+传感器包围脚贴的设计,PTFE材质的脚贴顺滑度OK,脚贴四周的倒角细节优秀,雷蛇在入门级产品的细节把控上还是很值得其他品牌去学习。鼠标的双模切换开关放置在了引擎光头下方,支持鼠标在蓝牙和2.4G无线之间自由切换,也方便了多设备场景下的快速切换适配。正因如此,传感器光头位置稍微靠前了一些,当然对于这个尺寸的鼠标来说这完全没有任何问题——根本用不出来区别。
清仓感应开关可以看到电池侧面单独粘附了一个温度传感器,可以让移动电源的芯片主动掌握电池温度,出现过热情况第一时间切断输出,保护电池与用户的安全。另外侧面也能看到卡扣细节,卡扣体积十分粗壮,PC材质也保证了相当出色的硬度与韧性。
P+F感应开关虽然在我的预计中CineAltaV 2的画质水平肯定要高于CineAltaV,毕竟分辨率提升了,但直到我在伦敦拍摄时尝试了CineAltaV 2,我才真正意识到画质的巨大提升。即使在摄影机小小的屏幕上,也能看到图像质量的显著改善。除了分辨率的提高,动态范围也扩大了。新的传感器在高光部分的成像更加优秀,此外噪点更低,更高的分辨率加上16bit位深使得在肤色成像上有着令人难以置信的细节和纹理,这不像哪种算法模拟出来的细节,每个画面看起来都像用胶片摄影机拍摄的。
德州感应开关Imprint 互联技术首秀,iRobot Braava jet m6 擦地机器人评测 | 钛极客iRobot Braava jet m6 擦地机器人在家庭清洁的各个环节当中,对于体积较大的地面异物如果壳、纸屑的清洁往往更加容易,无论是传统的簸箕/扫把组合还是扫地机器人都可以很好地应对,而对于地面灰尘的清洁则一直是打扫中的一个难点。为此,很多厂商也开发出了“扫拖一体”的产品,不过在实际使用中,由于尘盒和传感器所占体积已经很大,给拖地装置留下的布局空间十分有限。这也使得“扫拖一体”产品能够达到的清洁效果有一定的局限性。iRobot在前不久发布的Braava jet m6擦地机器人就是为了应对这一使用场景的科技产品,实际上这也不是iRobot在扫地机器人领域推出的首款产品,2016年,iRobot就推出过同系列喷水擦地机器人。在Braava jet m6 擦地机器人上,可以看到很多科技升级,比如学习和记忆家居格局,自主优化每个房间以及全屋的清扫路径。另外就是Imprint 互联技术的首次搭载,通过该技术可以实现扫地/擦地机器人之间协同工作能力。迷你外观设计,方便深入家中角落清洁外观在外观方面很容易察觉到擦地机器人与扫地机器人的不同,相较于传统的圆形扫地机器人,Braava jet m6 擦地机器人则是完全的方形设计,同时在体积上也有所减小。产品主体部分采用白色为主色调设计,顶部的水箱盖略低于整体高度,并采用了灰色设计,视觉效果上十分简洁。白色为主的颜色搭配相信很多使用过iRobot扫地机器人产品的人都知道,无论是目前顶级的i系列还是偏向入门的500系列,都是以深色为主的配色设计方案。因此在产品的颜色搭配上也对两种不同工作方式的产品直接做出了区分。顶部的LED灯设计很巧妙Braava jet m6 擦地机器人身上还有一些小细节设计,比如在笔者初次开箱时就发现水箱盖周围有一圈很大的缝隙,一开始还以为是做工的瑕疵,在通电后才发现顶部的水箱盖周围缝隙中实际上隐藏有一圈LED灯,在日常状态与工作状态下会显示白色光,在配对等操作时则会显示蓝色,工作中遇到错误时会显示红色,在体验中灯光显示的效果非常直观且易懂。细节拎手在机器的顶部还设计有一个凹槽,实际上这是一个隐藏的“拎手”,便于移动Braava jet m6 擦地机器人。机器的整体重量并不大,即使是一般小孩子也能抱得动,由于其较为扁平的设计,所以对于家中桌椅、橱柜、书柜、等角落的通过性要比笔者体验过的大多数扫地机器人要更好一些,几乎没有卡住的情况。正面及产品底部在产品的正面分布有出水孔以及拆卸抹布的按键,需要注意的是Braava jet m6 擦地机器人采用的抹布安装为卡扣方式,按照抹布底部标志插入凹槽后,需要拆卸时通过按压正面的方形按键就可以使抹布弹出。底部的金属充电触点位于产品后部,前部同样分布有高度检测、碰撞检测等传感器。全部配件配件方面,Braava jet m6 擦地机器人除了充电底座以及电源线以外,还附赠有4块抹布以及充电座托盘。其中,4块抹布包括一次性使用的干/湿抹布各一块以及长效使用的干/湿抹布各一块,Imprint 互联技术,实现“先扫后擦”联动“iRobot HOME”APPBraava jet m6 擦地机器人同样采用“iRobot HOME”APP进行匹配以及操作,初次使用时通过界面提示连接机器人的电源并放置于充电底座上,点击正面的按键开启匹配模式,此时机器会显示蓝色灯光,在APP中出现擦地机器人就可以点击连接了。设置在连接完成后,就可以开始进行清扫,此时更换不同的干/湿抹布机器也会自动对其进行识别并选择对应的模式。在APP设置中还可以查看当前机器人连接的WiFi、机器人的语音以及定位机器人位置。除此之外,Braava jet m6 擦地机器人还提供了三种清洁模式以及三档喷水量可选择。iAdapt 3.0智能导航技术Braava jet m6 擦地机器人上还搭载了很多Roomba i7+系列扫地机器人的智能科技,此前钛媒体也评测过该产品,其中包括vSLAM的iAdapt 3.0智能导航技术以及Imprint智能规划技术,iAdapt 3.0智能导航技术可以学习、绘制和自动适应家居环境,智能优化每个房间以及全屋的清洁工作。当机器人在清洁过程中发现电量不足时,也会自动返回充电座进行充电,并在充电完成后回到先前停止工作的地方继续清洁,直到完成所有的清洁任务。Imprint 互联技术该机器首发的Imprint智能规划技术则是一项用于联动扫地机器人与擦地机器人的技术,通过该技术,Braava jet m6 擦地机器人可以和Roomba i系列及9系列扫地机器人实现先扫后擦操作。另外在操作中也可以通过iRobot HOME APP中Roomba或者Braava jet的用户界面设置扫、擦联动,范围可以选择清洁整个屋子、或者仅仅某一个房间。“先扫后擦”联动在实际体验中,这种“先扫后拖”的清扫模式省去了很多操作的步骤,不过最为重要的还是其工作分配的合理性。笔者在使用中发现,无论是扫地机器人还是擦地机器人其工作性质所适用的对象都不同,如果在地面有碎物的情况下启动擦地机,它只会将这些残渣推到房间的角落,甚至将污染面积延展,而在地面未干的情况下使用扫地机器人,其工作效率将会因为无法很好地吸取地面垃圾而下降。往复式擦除清洁效果不错,水箱容量应对大户型仍受限顶部水箱Braava jet m6 擦地机器人的水箱容量相较于一般的扫拖一体机已经增大了不少,不过其喷射式的用水方式相比扫拖一体机的物理渗透式耗水量要更大一些。不过这也可以最大程度地发挥“湿擦”的清洁效果,在即将清理前部地面时,机器采用的是“喷水→擦拭→退回→2次擦拭”的逻辑。往复式擦地同时,前面也提到了APP中可以选择的三种清洁方式,在实际使用中,细致清洁是默认的清洁模式,该模式基本属于常用的状态,实际表现中清洁效果与覆盖面积比较平衡,测试使用场地的面积在100㎡左右,一箱半水基本够用。而深层清洁则更加适合于污垢较多的某一个房间。最后一个扩展清洁适用于平时一天一次到两次并且有扫地机器人配合擦地机器人使用的情况,基本可以满足清洁要求前部喷水在清洁能力上,如果能够保持一天一次的清洁频率,本身机器人所应对的污垢就不会很多,即使是北京这样灰尘较多的城市也基本够用,即便地上有酱油或者饮料,也可以很好地完成清理。而如果是三五天才使用一次的话,用深层清洁虽然效果不错,但是需要添加两次甚至三次水箱。另外,即使是默认清洁模式下,在一次应对大户型房间时,水箱容量尽管相比扫拖一体机充裕了不少,但依旧会有些不足。整体外观在体验中另一个比较满意的点在于使用时的噪声表现,由于内部没有风机工作,噪声明显相比于扫地机器人小了不少,即使家里有人也可以放心地让它工作,不至于让人觉得吵。另一点是往复式擦地相比扫/吸工作状态的扫地机器人,需要的工作时长要更多一些,全屋清洁一次需要1~1.5小时。总结相信对于大多数家庭而言,擦地机器人都不会是第一件用于清洁地面的家庭智能化产品,扫地机器人依旧是第一选择,但是“扫+拖”能够带来的清洁能力提升确实可以称得上“解放地面清洁劳动力”的效果了,从这点上说与扫地机器人搭配组合的擦地机器人是非常重要的一环。回到Braava jet m6擦地机器人这款产品本身,它所具备的清洁能力表现是非常不错的,另外像Imprint互联技术的搭载,确实提升了操作以及使用的便捷性,并一定程度上提升了工作效率,对于那些已经拥有iRobot i7系列或者9系列的用户而言,是非常合适的功能互补组合。(本文首发钛媒体,摄影、作者/邓剑云)更多精彩内容,关注钛媒体微信号(ID:taimeiti),或者下载钛媒体AppiRobot为何坚持扫擦分离?Roomba970+Braava380套装体验作为一名科技宅男,多少有些“懒散”,尤其不喜欢扫地、擦地,随着这两年的智能家居的推进,智能扫地机器人技术逐渐成熟起来,应该可以帮我做日常清洁了吧~ 脑子里想着这事,坚持擦完最后一块地板,起身把擦地布丢向垃圾桶,嗯,是时候“迎娶”扫地机回家了。
清仓感应开关realmeX50 Pro采用前置超广角双摄,广角主摄采用3200万像素索尼IMX616传感器,超广角摄像头则采用800万像素传感器,具备105° 超广角,自拍显脸小,能够轻松拍出最美的你。后置采用6400万主摄+1200万像素2倍长焦镜头+119° 超广角镜头+人像Mono镜头的组合,既可以为我们提供清晰细腻的成像效果,又可以满足我们在多场景下的拍照需求,非常方便。而且支持超级夜景3.0,带来全新三脚架模式和极暗夜景模式,夜景模式下画面亮度大幅提升,暗部细节也有了更好的表现,从而拍出高质量的照片。
其主摄采用Sony IMX586传感器,搭载f/1.6大光圈和1/2 英寸的大底传感器,白天可以保证细节反馈,夜间可以保证进光量,且支持光学防抖。117度视角的超广角镜头可以呈现更加丰富的内容,畸变控制很是到位。
观察烟雾探测器就是其中一个非常有用的细节,在一些国家甚至是是呃逆必须强制性安装的。但现在使用的一些摄像机看起来就像这些传感器一样。它们的外观很相似。仔细观察后,你会发现,这个摄像机会配备一个相机镜头(传感器中没有任何东西看起来像一个镜头)和一个存储卡或插槽。
暗角提升性能(选择性暗角)暗角通常用于最大化展现镜头设计在成像画面的分辨率。由于将本来被阻隔在镜头边缘的射线引导到传感器上的理想位置更加困难,因此高分辨率的物体通常相比于中心位置,更难在图像边缘处重建细节。光照信号落在错误的像素位置时,会降低该位置的图像质量;一个办法就是把这些入射光线从系统中清除掉。如果不想要的射线没有到达传感器,它们就不能降低图像质量。然而,移除这些错误定向的光线,会减少相对的光照。
大众一直以来都很在意主动交互的细节,比如“靠近即响应”的大屏交互。由于大屏附近预埋了距离传感器,每次我的手一接近,屏幕就会自动调节亮度,或者将重要按键做动画高亮。这些都需要相应的硬件成本加持,并做好系统级的融合。