P+F感应开关航姿参考系统(AHRS)是无人机的“心脏”,它包括惯性传感器、磁力计和处理单元。AHRS可预估设备的行进方向,如滚转、俯仰和偏航的角度。传感器的不准确性,如偏移、灵敏度误差或热漂移,会导致定向误差。图1显示了定向误差(滚动、俯仰角度)与加速度计偏移的函数关系,定向误差通常是传感器误差链中最大的因素。例如,仅20 mg的加速度偏移量将导致设备出现1度的方向误差。

(P+F 背景抑制传感器 ML100-8-H-350-7635-RT/103/115a)
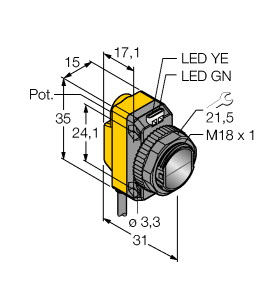
微型设计,易于使用,光斑极为明亮、清晰,全金属螺纹安装,清晰可见的 LED,用于指示通电和开关状态,对环境光不敏感
检测距离 : 5 ... 350 mm 最小检测范围 : 5 ... 30 mm 最大检测范围 : 5 ... 350 mm 调整范围 : 30 ... 350 mm 参考目标 : 标准白色平板,100 mm x 100 mm 光源 : LED 光源类型 : 调制可见红光 偏振滤波片 : 无 黑/白差 (6 %/90 %) : < 18 % 当 350 mm 光点直径 : 大约 20 mm 相距 350 mm 发散角 : 大约 4 ° 光学端面 : 向前直射 环境光限制 : EN 60947-5-2:2007+A1:2012 MTTFd : 860 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:通电 功能指示灯 : 黄色 LED: 检测到物体时亮起 控制元件 : 感应范围调节器 控制元件 : 亮时接通/暗时接通转换开关 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : < 20 mA 开关类型 : 该传感器的开关类型是可更改的。默认设置为: 亮时接通 信号输出 : 1 路 PNP 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 电压降 : ≤ 1,5 V DC 开关频率 : 500 Hz 响应时间 : 1 ms 产品标准 : EN 60947-5-2 EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证的 2 类电源,或具有有限电压输出且带(可以是集成式)保险丝(最大值为 3.3 A,符合 UL248 标准)的认证电源,1 类外壳 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -30 ... 60 °C (-22 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 11 mm 外壳高度 : 31 mm 外壳深度 : 20 mm 防护等级 : IP67 连接 : 65 mm 固定缆线 有 M8 连接器,4 针 材料 : 质量 : 大约 15 g 紧固螺丝的紧固扭矩 : 0,6 Nm 电缆长度 : 65 mm
烟台感应开关在此,宁波大学物理科学与技术学院王刚课题组报告了一种简单、可扩展、成本效益的方法,用于印刷和染色石墨烯基电子纺织品。导电膏选用高导电性的优质石墨烯和铜颗粒。基于天然纺织品的结构,说明了石墨烯基电子纺织品在多功能、舒适和高性能可穿戴传感器,包括压力、应变和弯曲传感器方面的优势。石墨烯基电子纺织品具有较高的导电性(36.2 S m−1)、优异的柔韧性、显著的抗拉强度和耐洗涤性能。此外,基于石墨烯E-textile制备的可穿戴传感器具有高灵敏度(18.56 kPa−1)、正电导率响应、响应时间快、长期稳定性好和不需要聚合物材料封装的耐久性。研究表明,基于石墨烯的电子纺织弯曲传感器,其阻力随弯曲角度呈线性变化,为其在仿生机器人上的应用铺平了道路。该研究成果以""Conductive Graphene-Based E-textiles for Highly Sensitive, Breathable, and Water-Resistant Multimodal Gesture-Distinguishable Sensor"为题发表在国际著名期刊Journal of Materials Chemistry A上。
原装感应开关3.元器件。量子通信、量子计算专用器件。超小型大容量片式多层陶瓷电容器(MLCC)、车规级MLCC、微波射频MLCC、片式叠层固态铝电解电容器、片式单层陶瓷电容器(SLC)、硅电容器、MLCC生产设备、超小型功率电感器、一体成型电感器(模压电感)、声表面波滤波器(SAW)、体声波滤波器(BAW)、薄膜腔声谐振滤波器(FBAR)、小型片式压电石英晶体器频率元器件(谐振器、振荡器、滤波器)、高基频石英晶体频率片、CMOS及SAW模块用陶瓷封装基座、99.6%的氮化铝陶瓷基板、超小型片式厚膜电阻器、片式薄膜电阻器、合金电流检测电阻、片式合金箔电阻器、片式热敏电阻器、片式压敏电阻器、片式电位器、导电塑料电位器、集成无源器件等。功率场效应晶体管(MOSFET)、快恢复二极管(FRD)、绝缘栅双极型晶体管(IGBT)、集成门级换流晶闸管(IGCT)、肖特基二极管等新型电力电子器件。大功率模块、智能功率模块(IPM)和用户专用功率模块(ASPM)等。硅基光电子器件、碳化硅、氮化镓、砷化镓等宽禁带电力电子、射频器件。高阶积层板、IC基板、埋置元件板等高密度互连(HDI)板、特种印制板(高频板、金属基板和厚铜箔板)、高性能覆铜板。微型化、集成化、智能化、网络化传感器,具有无线通信、传感、数据处理功能的无线传感器网络节点。直流无刷电机及智能化微特电机以及为机器人配套的减速器、伺服电机等。高可靠、高精度、高动态环境下的运动控制器,具备大范围三维空间建模、实时位姿检测、运动避障以及动态路径规划等移动机器人“大脑”功能。3D成像用低角度偏移窄带滤光片组立件。高抗拉强度海洋光纤及其中继器、多芯少模光纤及其连接器、超宽带光放大掺杂光纤及放大器、超高芯密度微簇光纤单元及微缆、全干式室外光缆、5G通信用MPO多芯光纤连接器套件。高效热管理与散热元器件、超广角透镜及其模组,G.fast DSL分离器和电感器,100A以上车载大功率电感和变压器。为新能源产业配套的新型储能电池、超级电容器、为新能源汽车配套的高压直流继电器、PhotoMOS继电器、CMOS继电器、特种功率电阻器以及电力电子用关键电子元器件。超级电容器及与电池混合应用,超级电容器生产设备。高能量密度、长循环寿命、高安全性的消费型、动力型和储能型锂离子电池,大容量锂离子电池系统集成和产业化,大容量电池组管理系统。新型、高性能、高安全性的正负极材料、隔膜材料、电解质、溶剂、添加剂、铝塑膜材料。燃料电池材料,小型实用燃料电池,小型燃料电池系统应用。
P+F感应开关为了使小卡机器人实现正确的运动,我们就必须研究现有的机器人。我们要研究现在的机器人产品是如何上下左右自如地转动它们的头部的,要了解需要哪些部件才能使它们做出这些动作,还要明白机器人身体内的传感器的检测角度,并要确保身体运动不能妨碍传感器正常工作。
烟台感应开关防爆防水结构设计,满足Ⅱ类防爆场景要求;巡检机器人采用模块化驱动设计,体积小、重量轻、爬坡角度大,适用于各种复杂现场环境;机器人采用吊挂在轨道上的运行方式,不占用地面空间,不影响行人;采用先进的无线移动通讯技术,通讯距离远,抗干扰性强,既能保证图像及数据的实时传输,又符合防爆要求;采用多种检测方式及数据处理算法,能够实现多种智能化分析识别要求;云台采用分布式结构设计,体积小、重量轻,定位精度高,旋转角度覆盖全方位;机器人搭载设备的高效融合,解决了机器人搭载传感器,检测到设备故障后,配合图像信息、声音定位信息的机器人全方位状态记录;产品可靠性高,安装、操作、使用便捷,维护简单,对减员提效、减轻巡检人员的劳动强度具有重要意义。现场应用
原装感应开关在这项研究中,RMED的形状由集成磁性传感器监控,该传感器探测外部参考场,如图 A所示。椭圆形传感器堆叠(85×55微米2)被定位成对,一个锚定到所述衬底(传感器1)和第二在自由站立聚合物载体(传感器2)的尖端。这些传感器的工作方式如下:"自由层"的磁化与外部磁场的磁化对齐,而"参考层"(图A)的磁化方向 在器件制造过程中被永久性磁化时在磁场中退火。整个叠层的电阻取决于参考层和自由层的磁化方向的相对方向。当磁化方向平行时,电阻最低,而当磁化方向反平行时,电阻最高。致动后,传感器2相对于传感器1偏转角度θ(图 A),其中θ = 0°对应于平面,而θ = 180°对应于U形状态。后一种情况与抓取物体或夹具有关。当θ > 0时,外部磁场会导致传感器1和2的自由层磁化方向不同,这些方向沿传感器平面上的场投影对齐。角度φ传感器的自由和参考层之间的电性测量,以确定相对于外部磁场的取向装置取向。
雷达的安装高度建议距离地面30~50cm,倾斜角度(如图6所示β:雷达出光方向与水平面的夹角)建议在20-60°中间。注意:安装时不能遮挡雷达的视场范围,否则会造成测距不准确、有效量程衰减,在遇到波动的水面等高反光路况下,雷达数据的可信度会有所降低。多传感器数据综合应用是一个可以提升可靠性的方法。
智能巡检机器人通过智能视觉识别和视频功能,对配电柜保护压板、指示灯、刀闸位置、旋钮等状态进行有效核对;通过红外热成像仪对开关柜刀闸位置的温度进行红外检测,可伸缩的局放传感器能对开关柜进行局放检测。另外,与开关柜综合保护装置触发联动巡检,实现配电室内设备全自动巡检以及事故联动巡检功能。机器人还可以多角度旋转上下伸缩,最长伸缩可达到1.6米,确保巡视点位多方位覆盖,实现故障预警,提升巡检效率。机器人能将采集的数据实时上传,供工作人员随时查看当前和历史的巡视数据。在集控中心,现场工作人员正在通过电脑显示屏观看机器人的工作情况和相关数据,及时有效确保供电设备安全可靠运行。
镜头:镜头作用主要在于将光线汇聚至图像传感器,其透光率以及折射角度会影响 到进入图像传感器像素点的光线数量。在材质方面,玻璃镜片的透光性能优于塑料 镜片,但在成本方面处于劣势,因此厂商会采用玻塑混合的折中方案以改善成像, 如 1G6P(1 片玻璃镜片+6 片塑料镜片)。此外镜片数量也会影响成像的效果,镜 片数量更多有助于对光线的修正,可往往伴随着光轴偏移概率提升、制造良率下降 等问题。
A)传感器偏转角的定义θ和参考层和自由层取向之间的角度φ从平坦到U形状态时偏转。B)参考磁场的第一种可能配置:在XZ平面中旋转。C)由同一RMED承载的两个传感器的归一化信号。信号在平面(I)中同相,在卷曲(II)状态中异相。D)参考磁场的第二种可能配置:沿X轴(B X),Z轴(B Z)的静态磁场),或在XZ平面上倾斜45°(B XZ)。E)在致动时所投影的场的关键参数的计算估计:(I)传感器角φ,(II)所投影的相对场强,以及(III)所得到的GMR传感器信号。计算考虑了磁场B = B X,B = B Z和B = B XZ的不同方向。